




























3-Finger Adaptive Robot Gripper Instruction Manual
Register:
POSITION REQUEST (FINGER A IN INDIVIDUAL MODE)
Address:
Byte 3
Bits
7
6
5
4
3
2
1
0
Symbols
rPRA
This register is used to set the target position of the fingers for the Adaptive Gripper (or Finger A only if bit rICF is set). The positions 0x00 and 0xFF
correspond respectively to the fully opened and fully closed mechanical stops.
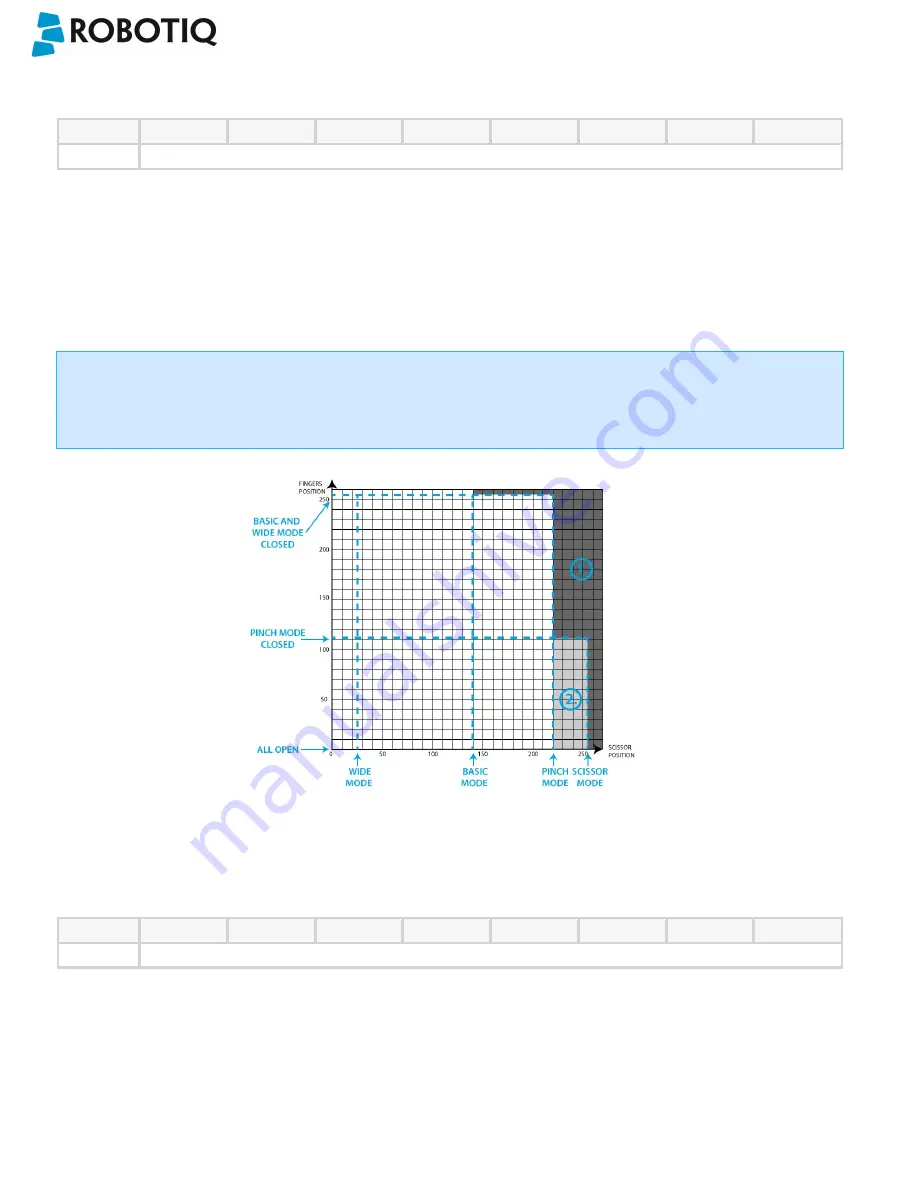
Figure 4.4.1 represents the reachable workspace of the fingers and scissor axis. Note that the finger position on the figure represents the maximum
value for the three fingers. Also, note that the fully opened and fully closed software limits are not shown on the figure for simplicity. The fully closed
software limit of the scissor axis when the Individual Control of Scissor option is selected is also not shown for simplicity.
rPRA
l
0x00 minimum position (open)
l
0xFF maximum position (close)
Info
In order to protect the Gripper from geometric interferences, several software limits are implemented and therefore some positions are not
reachable. When a finger reaches the software limit, the Gripper status will indicate that the requested position has been reached. This is
because the requested position is internally replaced by the software limit. In figure 4.4.1, zone 1 is the never reachable space, while zone 2 is
only reachable when requesting the scissor motion in individual mode.
Figure 4.4.1 : Reachable workspace of the fingers and scissor axis, zone 1 is never reachable, zone 2 is only reachable in individual control of
Scissor Mode.
Register:
SPEED (FINGER A IN INDIVIDUAL MODE)
Address:
Byte 4
Bits
7
6
5
4
3
2
1
0
Symbols
rSPA
This register is used to set the Gripper closing or opening speed (or Finger A only if bit
rICF
is set) in real time, however, setting a speed will not initiate
a motion.
rSPA
l
0x00 minimum speed
l
0xFF maximum speed
©Robotiq inc. 2008-2018
36






































































