





























Appendix A – Specifications
73
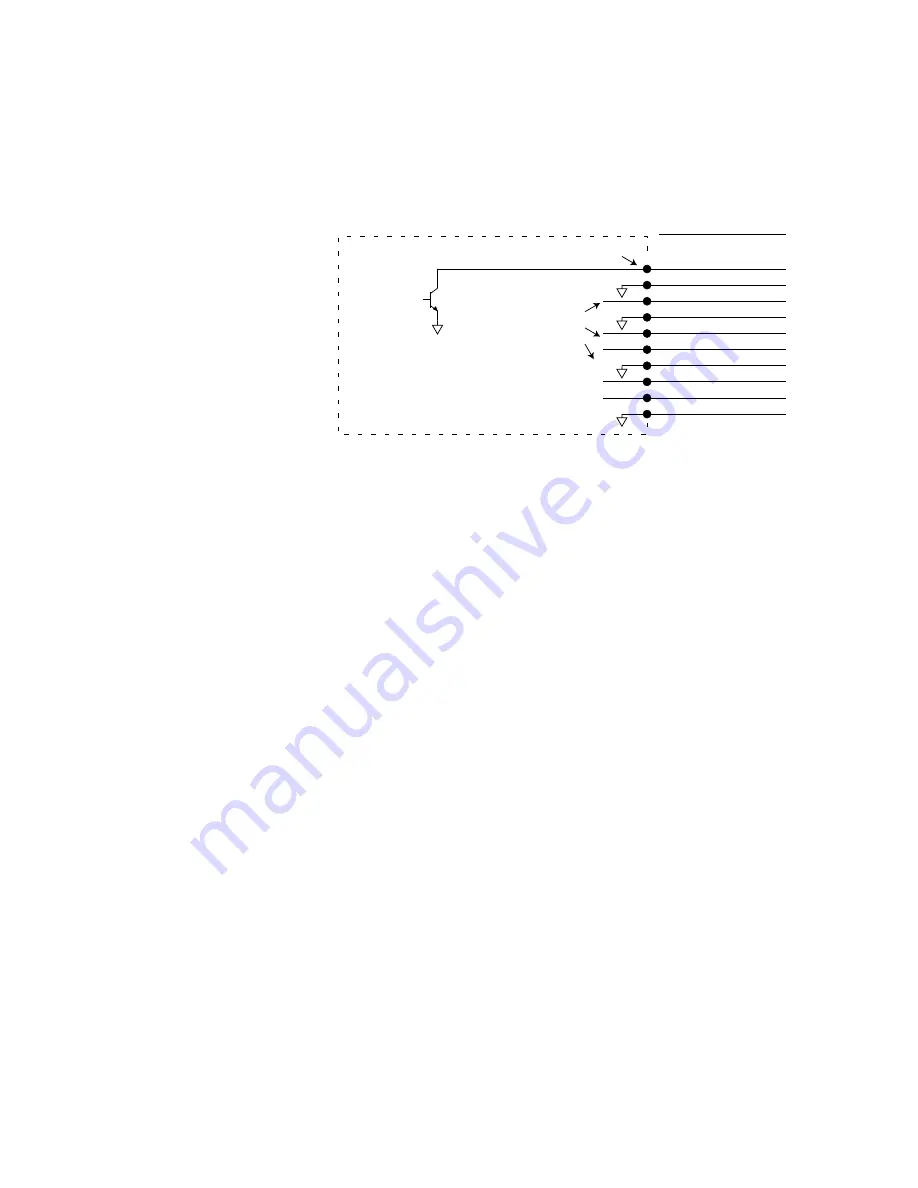
Digital Outputs (optional)
The Gem6K drive has six digital outputs. All connections are shown in the next
drawing. Default function is general purpose, but you can use the OUTFNC
command to redefine the function of any of the outputs. See the
Gemini GV6K/
GT6K Command Reference
for more information.
Internal Connections
41 Output 1
42 Output Ground
43 Output 2
44 Output Ground
45 Output 3
46 Output 4
47 Output Ground
48 Output 5
49 Output 6
50 Output Ground
DRIVE I/O Connector
Open Collector,
300mA sink
capability
Do not apply
more than 30VDC
Same circuit
design as
Output 1
Outputs
You can use the OUTLVL command to configure each of the outputs as active
high or active low. The default value is active low.
Encoder Output – GV6K Servos Only (optional)
Pins 14 – 19 are encoder outputs.
Encoder Output Specifications:
Default Resolution:
Quadrature outputs
4000 counts per revolution, post quadrature
Clockwise Rotation:
Channel A leads Channel B
Counterclockwise Rotation:
Channel B leads Channel A
The encoder outputs operate in one of two modes:
Pseudo Encoder Mode:
Output Channels A and B are derived from position information from the load
feedback device (e.g. encoder or resolver). The outputs are
not based on calculated
or commanded position. Pseudo encoder mode is the default mode, unless all
conditions listed below are satisfied. There is no Channel Z output in pseudo
encoder mode.
Pass Through Encoder Mode:
If the following conditions are satisfied, then Channels A, B, and Z are “passed
through” the drive, from the feedback device (e.g. encoder or resolver) to the
encoder outputs.
Required Conditions using an Encoder as Feedback Device
1. ERES and ORES values are equal.
Required Conditions using a Resolver as Feedback Device
1. Resolver is selected as the feedback device (SFB command).
2. ERES is set to 4096.
3. ORES is set to 4096.
If any of these conditions is not satisfied, then the outputs will operate in pseudo
encoder mode.





















































