№
SX-DCT00221 -
13-
Panasonic Corporation
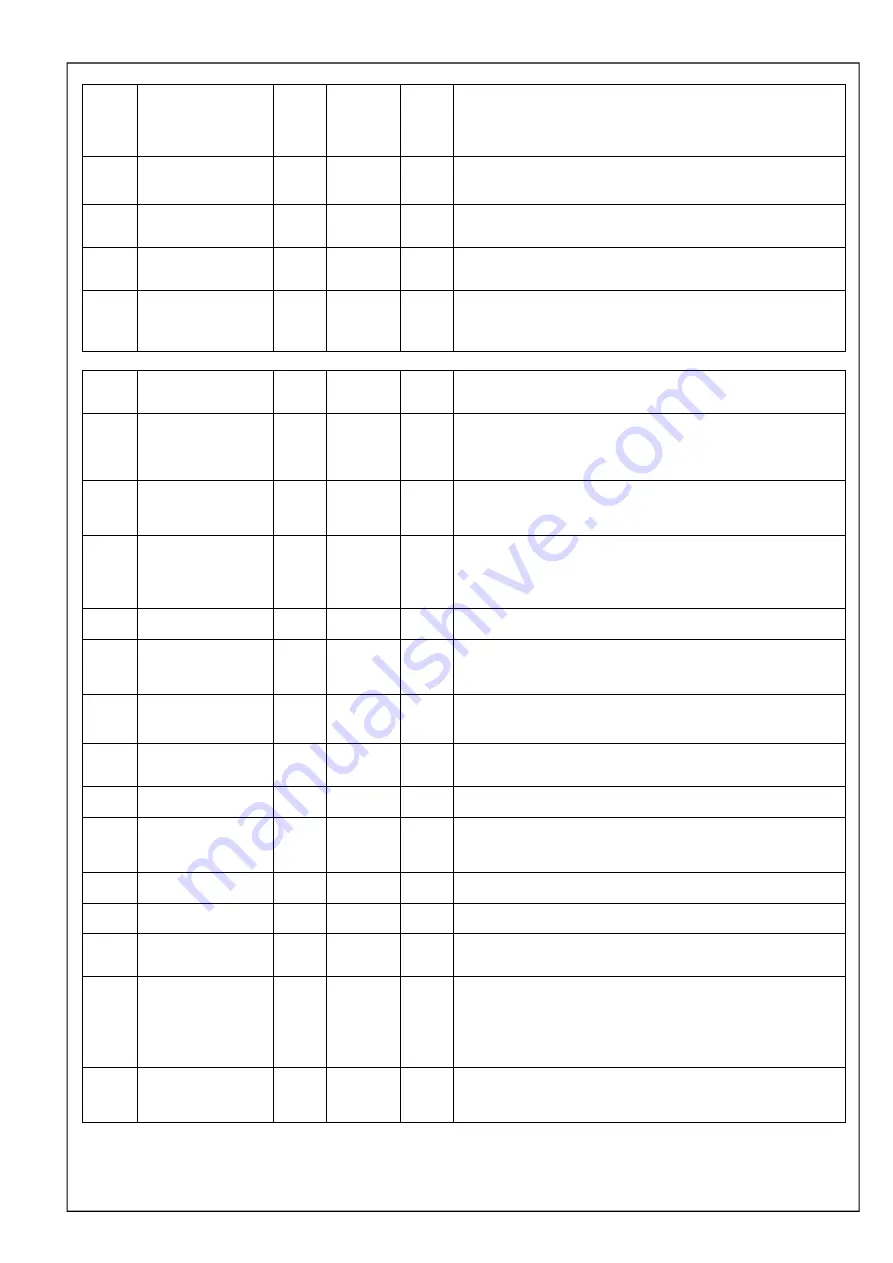
Parameter
No.
(Pr
□□
)
Name of parameter
Effective
after
power re-
setting
Setting
range
Default
Description
32
The 2nd velocity loop
integration gain (the 2nd
gain)
0~10000
500
You can determine the rigidity of velocity loop.
33
The 2nd velocity feed
forward gain
(the 2nd gain)
0~100
0
Setting unit [%]
34
The 2nd speed
detection filter
(the 2nd gain)
5~20
13
Use the default setting normally.
You can set the time constant of low-pass filter in
speed feedback.
35
The 2nd torque limit
setting (The 2nd gain)
0~200*1 200*1
Upper limit of torque reference is set.
(Use as a guide.)
torque reference :A value based on a rated torque of 100. By calculating the load
factor using this, it aims at the minimum motor burnout protection, and the accu-
racy can not be guaranteed.
*1
The value is”180” in case of MBEK083***(750 W)
36
Gain switching mode
selection
0~2
0
0
: Fixed at the 1st gain,
1
: Fixed at the 2nd gain
2
: Automatic switching (In running = the 2nd gain, In
standstill = the 1st gain
37
Gain switching time
0~10000
50
When the gain switching mode is set to automatic
switching, after the output of instruction, the 2nd gain
(in running) changes to the 1st gain (in standstill) when
time setting has elapsed.
Setting unit [ms]
38
In-position range
0~16383
20
In-position signal is turned on when position error
(difference between command position and actual
position) is below setting.
Setting unit [pulse]
39
Position error set-up
0~16383
144
Position error occurs when the value of position error
(difference between command position and actual
position) is larger than this parameter
×
8 as well as
parameter 3A is effective.
Setting unit [pulse]
3A
Position error
invalidation
0,1
0
0
: Effective,
1
: Ineffective (Motor does not trip but
keeps on operating.)
3E
Run-command
selection
○
0,1
0
You can select the run-command method with this parameter.
0
: Command through I/O,
1
: Command through RS485
(Command through I/O will be disabled except trip and
sensor input)
40
Homing mode
0~5
0
Select homing method.
0
: Home sensor homing 1,
1
:Home sensor homing 2
2
: Limit sensor homing,
3
: Bumping homing
4
: Home resetting,
5
: Home sensor homing 3
41
Homing direction
0,1
0
You can set the detection direction of home.
0
: Detecting in + direction
1
: Detecting in
−
direction
42
Homing speed
0~3000
200
You can set the speed in homing action.
Setting unit [r/min]
43
Homing limit
0~16383
0
When the home cannot be detected although the motor
travel distance has exceeded setting, homing error is
found. (Ineffective at 0)
Setting unit [rotation number]
44
Homing acceleration/
deceleration time
1~30000
200
You can set time taken for reaching the homing speed.
Setting unit [ms]
45
Bumping torque detection
value
0~200
50
You can limit the torque reference when returning
to bumping home. 100 indicates the rated torque.
46
Bumping detection
time
0~15000
100
You can set the detection time of bumping toque in
returning to bumping home.
Setting unit [ms]
47
Home offset
-16384~
16383
0
You can set the offset from home detection position.
When the home has been detected, set a value of plus
and minus opposite to the desired travel direction as an
offset. (When you set -100, the position traveling 100
pulses in +direction on the coordinate system is set as
an home.)
Setting unit [pulse]
48
Homing function
○
0~2
1
0
: Required,
1
: Not required (Position when power is
turned on is the home.)
2
: When homing is not completed yet, homing
operation is executed by positioning start signal.