





























64
IMS-MN-LMDA42C_A.pdf
CANopen DSP402 Operation Modes
LMD CANopen
Refer to the following graphic for an overview of motor phase current.
Run current
RC=[0...100%]
Hold current
HC=[1...100%]
Fixed or variable current
AS = 0
AS = 1
AS = 2 (variable)
AS = 3 (variable)
I
ACTUAL
I
CTRL
RC
HC
Hold current delay time
HCDT=[microseconds]
CANopen DSP402 Operation Modes
The LMD operates as a node on a CANopen network and is controlled by a CANopen master.
Details are available in the CANopen Fieldbus Manual, available for download from:
https://novantaims.com/dloads/
Profile Position Mode
A
target _ position
is applied to the trajectory generator. It is generating a
position _
demand _ value
for the position control loop described in the position control function
section. These two function blocks are optionally controlled by individual parameter sets.
At the input to the trajectory generator, parameters may have optional limits applied before
being normalized to internal units. Normalized parameters are denoted with an asterisk. The
simplest form of a trajectory generator is just to pass through a
target _ position
and to
transform it to a
position _ demand _ value
with internal units (increments) only.
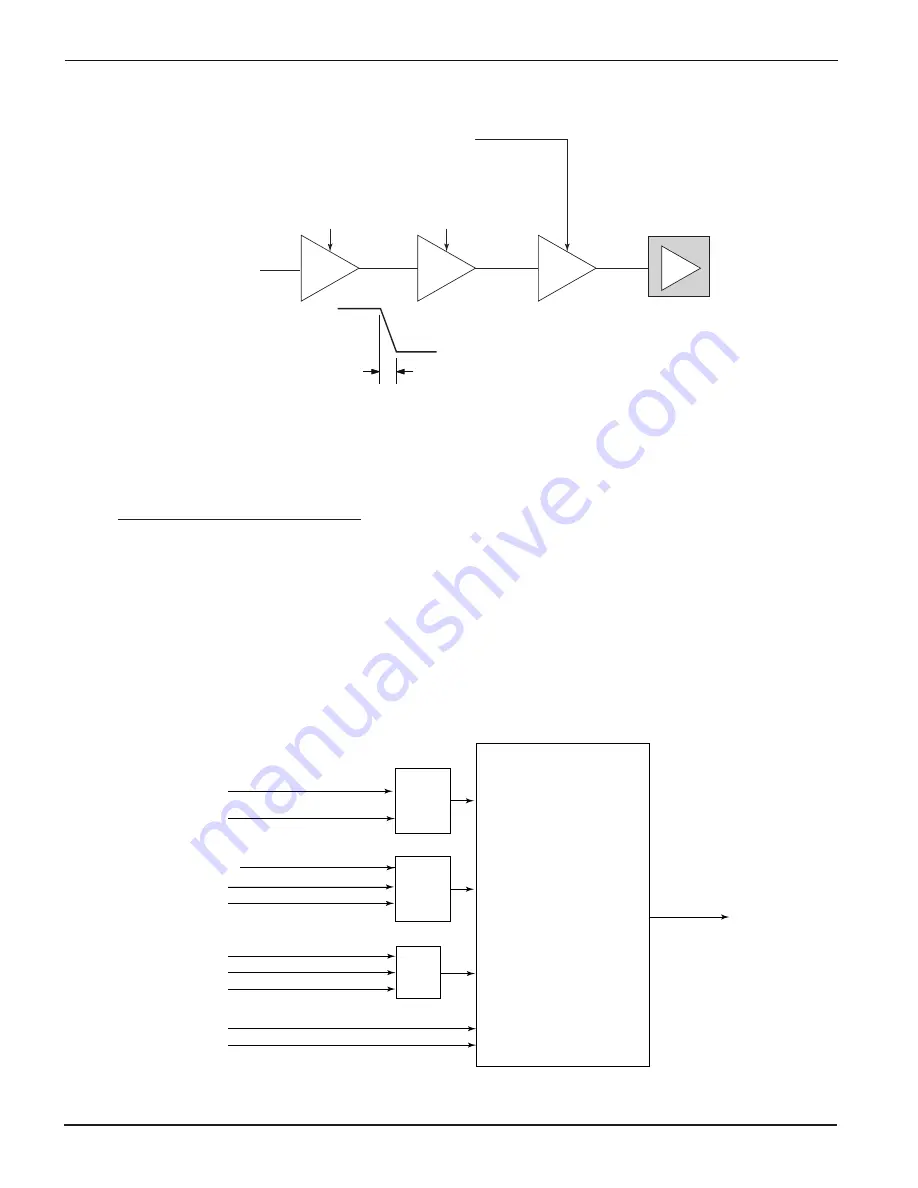
Refer to the following graphic for an overview of DSP402 profile position mode.
Trajectory Generator
Target Position (607Ah)
Polarity (607Eh)
Multiplier
Profile Acceleration (6083h)
Profile Deceleration (6084h)
Quick Stop Deceleration (6085h)
Quick Stop Option Code (605Ah)
Motion Profile Type (6086h)
Limit
Function
Profile Velocity (6081h)
End Velocity (6082h)
Polarity (607Eh)
Multiplier
Position
demand
internal
value (60FCh)
Target Position
(internal increments)
Profile Acceleration
Profile Deceleration
or Quick-Stop Deceleration
(internal increments/sec
2
)
End Velocity
(internal increments/sec))







































































