




























26
3 SIGNALS AND WIRING
3.2 Alarm occurrence timing chart
3.2
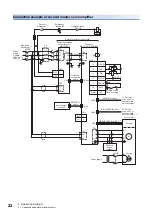
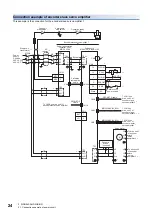
Alarm occurrence timing chart
When SSCNET III/H communication is shut off, the servo motor stops with the dynamic brake.
In the torque control mode, the forced stop deceleration function is unavailable.
This section describes MR-J4-DU_B4-RJ100 drive units only. For MR-CV55K4_power regeneration converter
units, refer to section 3.3 in "MR-CV_/MR-CR55K_/MR-J4-DU_(-RJ) Instruction Manual".
To deactivate the alarm, cycle the control circuit power or give the error reset or CPU reset command from the servo system
controller. However, the alarm cannot be deactivated unless its cause is removed.
Timing charts in this section show that an alarm occurs in any axis in the four axis of the parallel drive system.
CAUTION
• When an alarm has occurred, remove its cause, make sure that the operation signal is not being inputted, ensure safety, and reset the alarm before
restarting operation.
Power
regeneration
converter unit 4
Drive
unit 4
Encoder slave servo amplifier 3
Power
regeneration
converter unit 3
Drive
unit 3
Encoder slave servo amplifier 2
Power
regeneration
converter unit 2
Drive
unit 2
Encoder slave servo amplifier 1
SSCNET III/H
Servo system
controller
Power
regeneration
converter unit 1
Drive
unit 1
Encoder master servo amplifier
Servo motor
Alarm non-occurrence axis
Alarm occurrence axis
Alarm non-occurrence axis
Alarm non-occurrence axis
Alarm occurrence
Summary of Contents for Melservo-J4 MR-J4-DU*B4-RJ100 Series
Page 2: ......
Page 75: ...9 USING STO FUNCTION 73 9 MEMO ...
Page 81: ...11 APPENDIX 11 1 Analog monitor 79 11 MEMO ...
Page 85: ......







































































