



























4 STARTUP
4.1 Switching power on for the first time
33
4
4.1
Switching power on for the first time
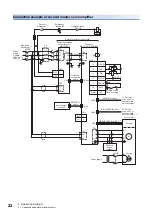
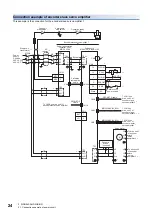
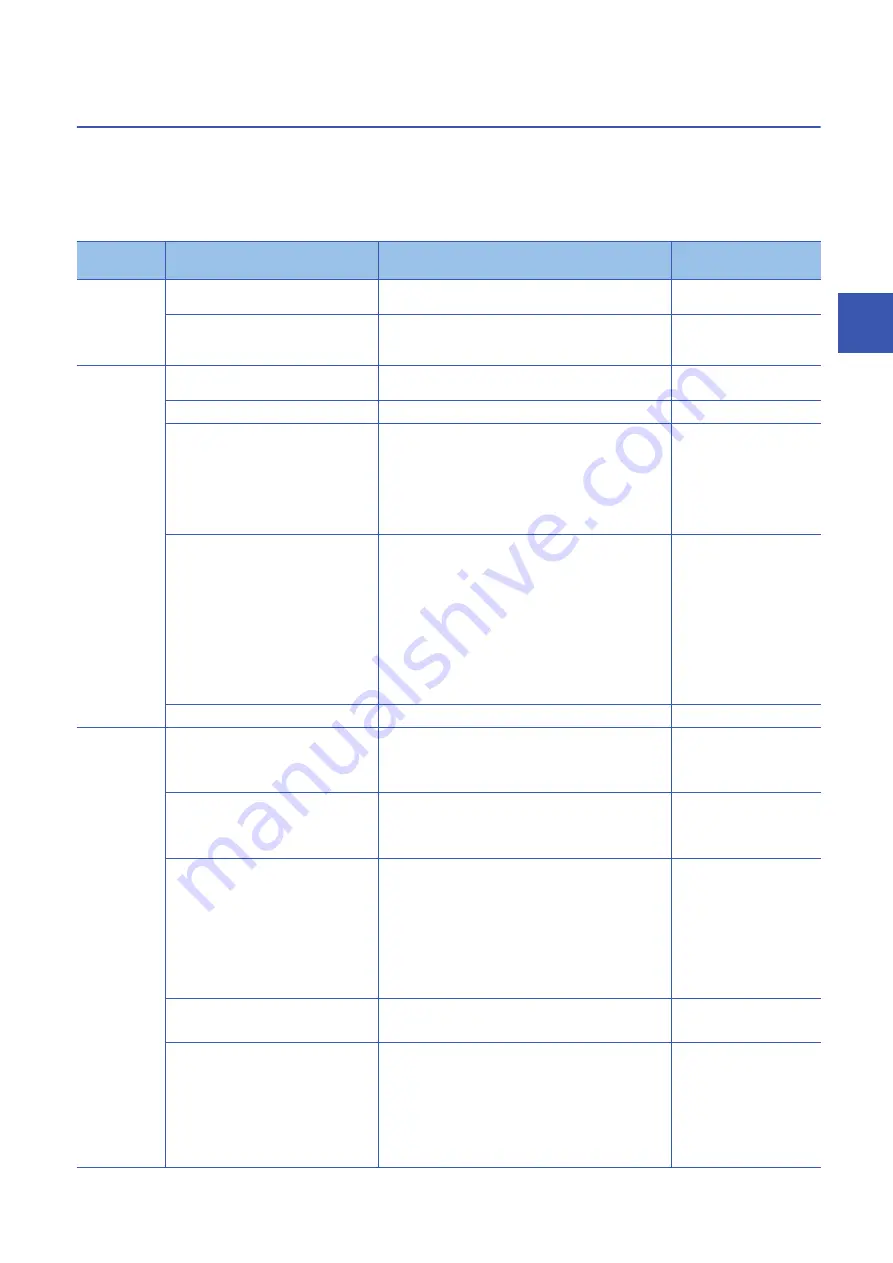
Start up the parallel drive system in the following procedure. Once settings are made, they do not need to be reset. When
changes are made to the system settings of the Motion controller, and the drive unit is replaced, start up the system in the
following procedure again.
"MR-J4-_B_" means "MR-J4-_B_(-RJ) Servo Amplifier Instruction Manual". "MR-J4-DU_B_" means "MR-CV_/MR-CR55K_/
MR-J4-DU_(-RJ) Instruction Manual".
Setting
classification
Step
Description
Reference
Servo amplifier
1.
Wiring check
Check whether the power regeneration converter unit, drive
unit, and servo motor are wired correctly.
MR-J4-DU_B_ section 3.4
2.
Surrounding environment
check
Check the surrounding environment of the power
regeneration converter unit, the drive unit and the servo
motor.
MR-J4-_B_ section 4.1.3
Controller
3.
Controller setting
Make the controller settings (normal and the following
settings specific to the parallel drive system).
4.
Controller power on
5.
System setting
The parallel drive system is identified as the one axis of the
servo amplifier in the SSCNET configuration of MT
Developer2.
Set the system settings with the encoder master servo
amplifier.
When the system is set with the encoder slave servo
amplifier, an error may occur.
6.
Servo data setting
Set the following servo parameters with MR Configurator2 of
MT Developer2. Set the servo parameter for the drive unit of
the encoder master servo amplifier.
• [Pr. PA02 Regenerative option]
• [Pr. PA17 Servo motor series setting]
• [Pr. PA18 Servo motor type setting]
• [Pr. PC04 Function selection C-1]
• [Pr. PF37 Parallel drive - Encoder ID setting 1]
• [Pr. PF40 Parallel drive - Servo motor side system setting]
• [Pr. PF41 Function selection F-12]
• [Pr. PF42 Function selection F-13]
Chapter 5
7.
Controller reset
Servo amplifier
8.
MR-CV55K4_ power
regeneration converter unit
setting
Set the converter setting rotary switch (SW1) to "0".
9.
Axis number setting of the
drive unit
Check the control axis No. set with the auxiliary axis number
setting switches (SW2-3 and SW2-4) and the axis selection
rotary switch (SW1) match the control axis No. set with the
servo system controller.
MR-J4-_B_ section 4.3.1 (3)
10.
Drive unit and Converter unit
power on
The 3-digit, 7-segment LED of the drive unit displays the
following.
Encoder master servo amplifier: 16
Encoder slave servo amplifier: 16
[AL. 16 Encoder initial communication error 1] will occur
because the servo parameters set for the encoder master
servo amplifier via the controller (MT Developer 2) are not
applied. Apply the servo parameters to the drive unit in the
next step.
11.
Drive unit and Converter unit
power off
Enable the servo parameters set for the encoder master
amplifier via the controller (MT Developer 2).
12.
Drive unit and Converter unit
power on
The startup is completed.
The 3-digit, 7-segment LED of the drive unit displays the
following.
Encoder master servo amplifier: b##
Encoder slave servo amplifier: b.##
"##" means each axis number. The decimal point in the 2nd
digit is lit on the 3-digit, 7-segment LED display of the drive
unit set for the encoder slave servo amplifier.
Summary of Contents for Melservo-J4 MR-J4-DU*B4-RJ100 Series
Page 2: ......
Page 75: ...9 USING STO FUNCTION 73 9 MEMO ...
Page 81: ...11 APPENDIX 11 1 Analog monitor 79 11 MEMO ...
Page 85: ......







































































