










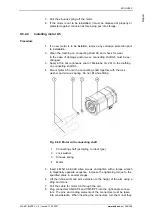



















Fig. 9-32: Securing robot arm
9.5.2.7
Concluding work
The following concluding work must be carried out:
• Move A4, A5 and A6 of the robot and look out for irregularities.
• Carry out mastering of A4, A5 and A6.
Detailed information about mastering is contained in the operating
and programming instructions for end users or system integrators.
• Test the program in Manual Reduced Velocity mode (T1).
9.5.3
Exchanging motor A6 and in-line wrist
Description
The following instructions describe the exchange of the motor and in-line
wrist. This description applies to floor-mounted robots. If the robot is in-
stalled in an inclined or suspended position, the procedure is to be
applied analogously.
During removal of the motor and in-line wrist, the robot can independently
move about this axis. Mechanical auxiliary equipment (e.g. support, crane)
or a stable end position (e.g. buffer) can be used to secure against mo-
tions.
Equipment
The following equipment is required:
KR IONTEC
272/344 |
www.kuka.com
MA KR IONTEC V4 | Issued: 11.05.2021
Repair
Summary of Contents for IONTEC KR 20 R3100
Page 14: ...KR IONTEC 14 344 www kuka com MA KR IONTEC V4 Issued 11 05 2021 Introduction...
Page 166: ...KR IONTEC 166 344 www kuka com MA KR IONTEC V4 Issued 11 05 2021 Planning...
Page 188: ...KR IONTEC 188 344 www kuka com MA KR IONTEC V4 Issued 11 05 2021 Start up and recommissioning...
Page 310: ...KR IONTEC 310 344 www kuka com MA KR IONTEC V4 Issued 11 05 2021 Repair...
Page 340: ...KR IONTEC 340 344 www kuka com MA KR IONTEC V4 Issued 11 05 2021 KUKA Service...




































































