





























AKD-N Installation | 7 Technical description and data
7.13.2 Switch-off behavior
The AKD-C 24 V supply must remain constant. Hardware Enable input disables all AKD-N
power stages immediately. Configured Digital Inputs and fieldbus commands can be used to
perform controlled stops.
The control functions Stop, Emergency Stop and Emergency Off are defined by IEC 60204.
Notes for safety aspects of these functions can be found in ISO 13849 and IEC 62061.
The parameter DRV.DISMODE must be set to 2 to implement the different stop categories.
Consult the
WorkBench Online Help
for configuring the parameter.
WARNING
No Functional Safety
Serious injury could result when a suspended load is not properly
blocked. Functional safety, e.g. with hanging load (vertical axes), requires
an additional mechanical brake which must be safely operated, for
example by a safety control.
Add a safe mechanical blocking (for instance, a motor-holding brake).
Set parameter MOTOR.BRAKEIMM to 1 with vertical axes, to apply the
motor holding brake immediately after faults or Hardware Disable.
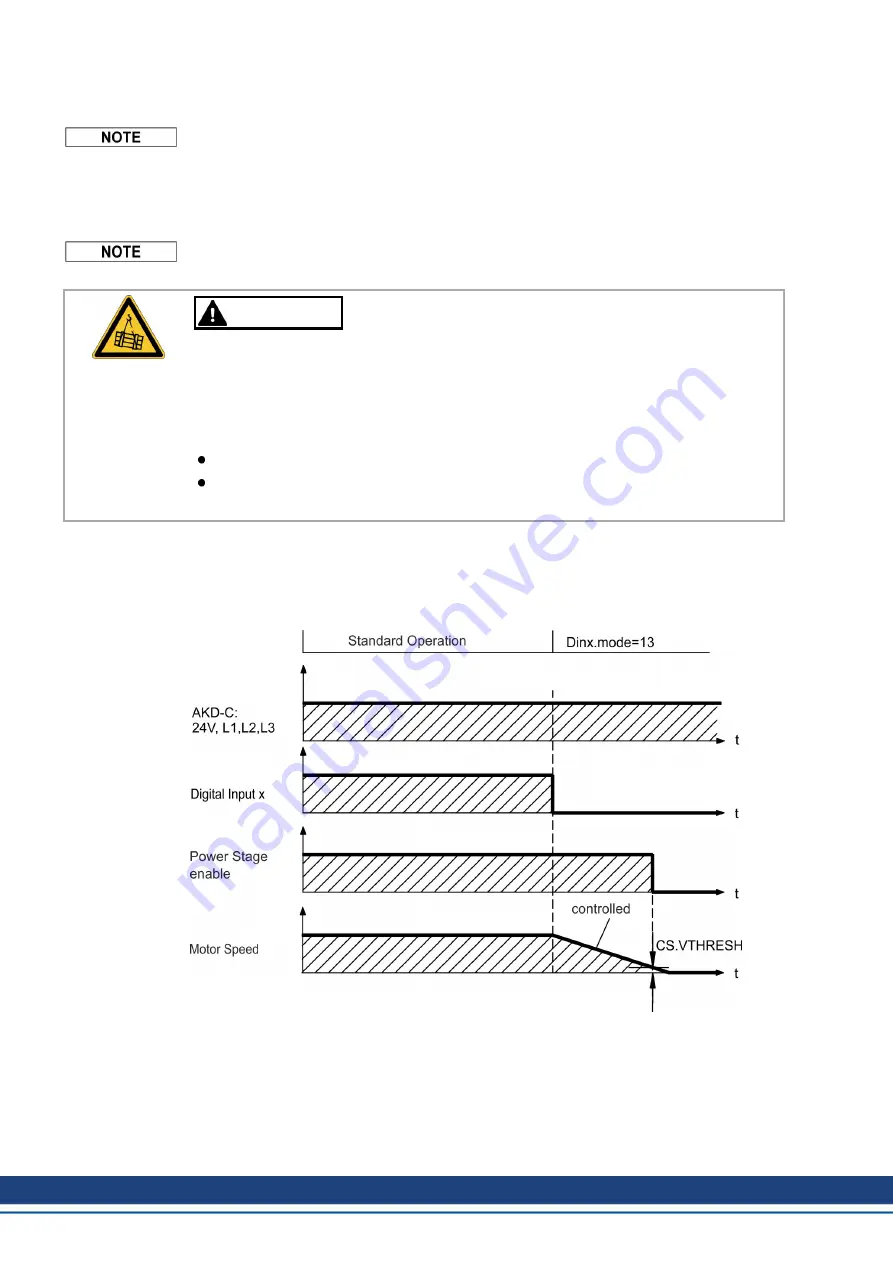
7.13.2.1 Switch-off behavior using a digital input (controlled stop)
This is a category 2 stop according to IEC 60204. A digital input can be configured to bring
the motor to a controlled stop and then disable the drive and apply the holding brake (if
present). See the
WorkBench Online Help
for information on configuring Digital Inputs.
If velocity drops below threshold
CS.VTHRESH
or timeout occurs brake is applied.
36
Kollmorgen | kdn.kollmorgen.com | February 2018







































































