
























Rhino
Robot
3
User Manual
22/32
Kinematiq SAS 2015-2020. All Rights Reserved.
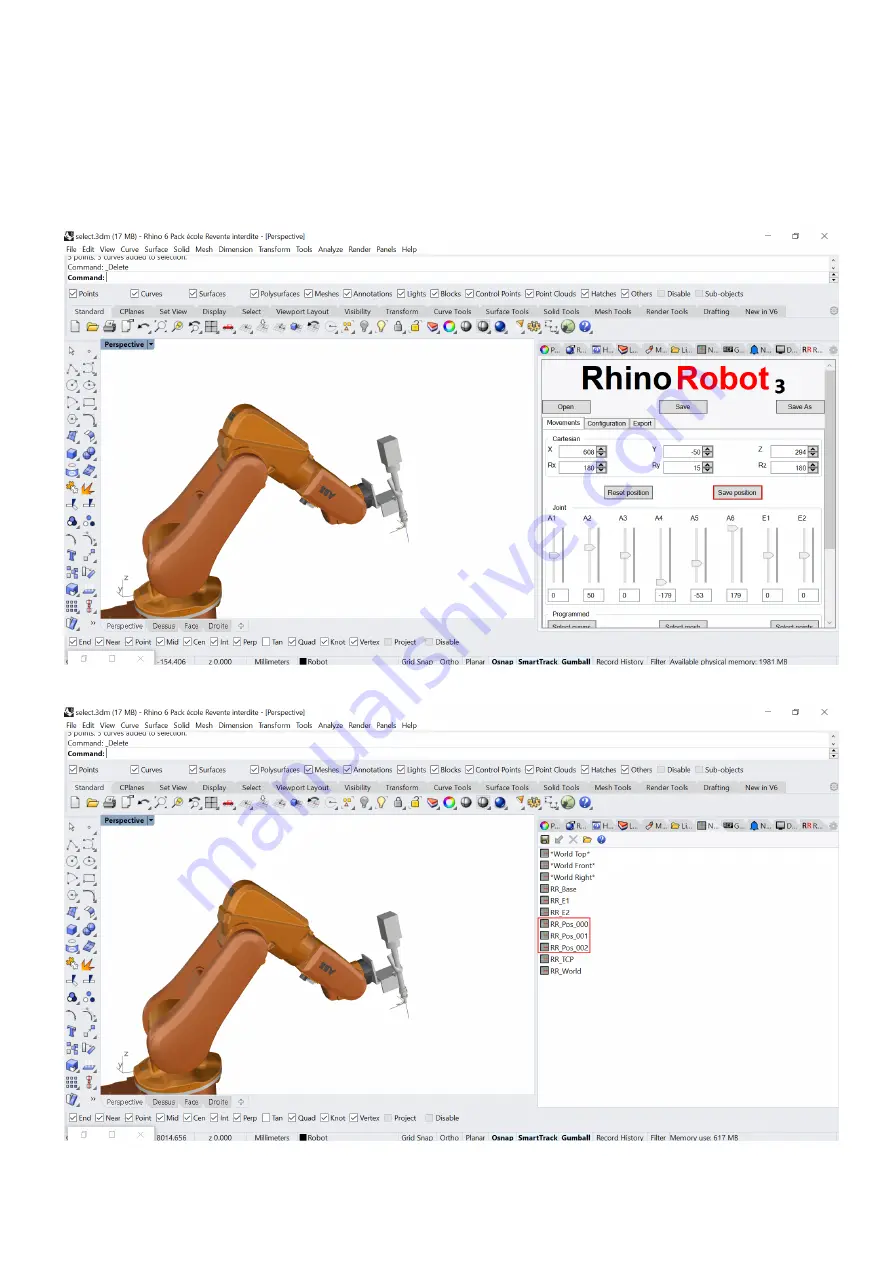
Recording positions
You have the ability to save a position of the TCP by clicking the Save position button. You can record as many
positions as you want. Each time you save a position it is saved as a named CP
lane as ‘RR_Pos_xxx’ and it is linked
through a line to the previous position. If you select ‘Saved position (CPlane)’ as a “Frames type” in the
programmed movement part the TCP will follow a toolpath consisting in a polyline between all your saved
positions.
Summary of Contents for RhinoRobot3
Page 1: ...RhinoRobot3 User Manual...