





























Version 1.00
| Optidrive ODE-3 IP66 Outdoor Rated User Guide |
33
www.invertekdrives.com
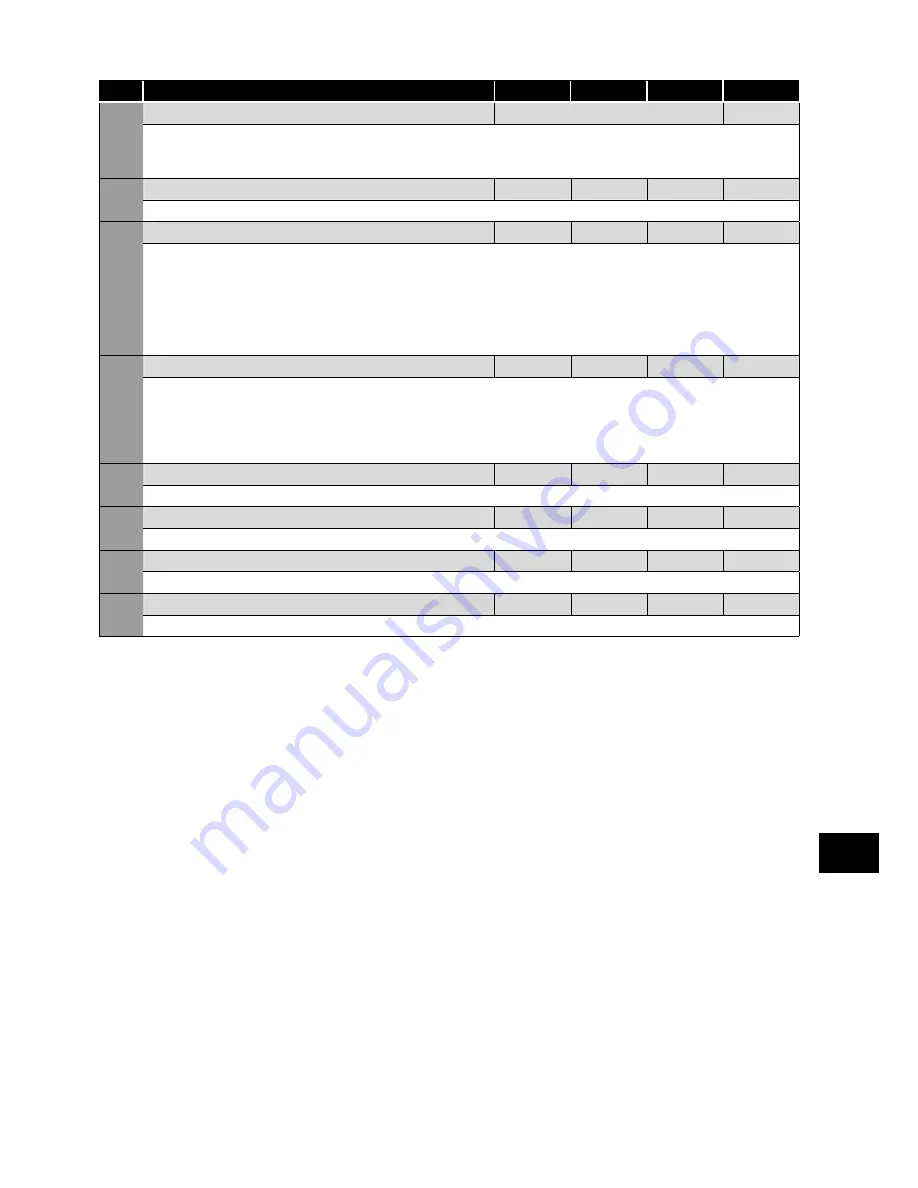
Par.
Description
Minimum
Maximum
Default
Units
P-08
Motor Rated Current
Drive Rating Dependent
A
This parameter should be set to the rated (nameplate) current of the motor. This parameter cannot be adjusted greater than the continuous
current rating of the drive.
When the motor nameplate value is entered, thermal overload protection is enabled.
P-09
Motor Rated Frequency
10
500
50 (60)
Hz
This parameter should be set to the rated (nameplate) frequency of the motor.
P-51
Motor Control Mode
0
5
0
-
0: Vector speed control mode for Induction Motors
1: V/f mode for Induction Motors
2: PM vector speed control for Permanent Magnet Motors
3: BLDC vector speed control for Brushless DC Motors
4: SR vector speed control for Synchronous Reluctance Motors
5: LSPM vector speed control for Line Start Permanent Magnet Motors
P-52
Motor Parameter Autotune
0
1
0
-
This parameter can be used to optimise the performance when P-51 = 0. Autotune is not required if P-51 = 1. For settings 2 – 5 of P-51,
autotune MUST be carried out AFTER all other required motor settings are entered.
0: Disabled
1: Enabled.
When enabled, the drive immediately measures required data from the motor for optimal operation. Ensure all motor
related parameters are correctly set first before enabling this parameter.
P-53
Vector Mode Gain
0.0
200.0
50.0
%
Single Parameter for Vector speed loop tuning. Affects P & I terms simultaneously. Not active when P-51 = 1.
P-55
Motor Stator Resistance
0.00
655.35
-
Ω
Motor stator resistance in Ohms. Determined by Autotune, adjustment is not normally required.
P-56
Motor Stator d-axis Inductance (Lsd)
0.00
655.35
-
mH
Determined by Autotune, adjustment is not normally required.
P-57
Motor Stator q-axis Inductance (Lsq)
0.00
655.35
-
mH
Determined by Autotune, adjustment is not normally required.
Asynchronous Induction Motors (IM) Vector Control
Optidrive E3 factory default parameters are intended for use with IM motors where the power rating of the motor is approximately the
same or slightly less than the indicated power rating of the drive. In this case, it should be possible to operate the motor without any
parameter adjustment at all for initial testing.
For optimum performance, the drive parameters should be adjusted to match the motor ratings. This will also ensure correct protection
of the motor from damage due to overload.
The basic parameters that should be adjusted are:
P-07 : Motor Rated Voltage (V)
P-08 : Motor Rated Current (A)
P-09 : Motor Rated Frequency (Hz)
In addition, it is also possible to set:
P-10 : Motor Rated Speed (RPM)
When this parameter is adjusted, slip compensation is activated. Slip compensation attempts to compensate the motor speed
relative to the load applied, such that when operating at a constant speed with different loads, the motor shaft speed should remain
approximately the same.
To further improve the performance of the motor, the following additional steps can be followed:
Carry out an Autotune.
o This requires Advanced Parameter Access, P-14 = P-37 + 100 (Default : 201).
o After the correct nameplate information is entered from the motor, the drive can additionally measure some electrical
characteristics of the motor to further optimise the motor control to suit connected motor.
o This is achieved by setting P-52 = 1.
Parameters
6







































































