


























97
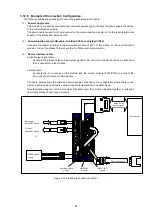
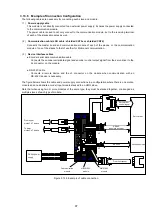
3.13.6 Example of Connection Configuration
The following cables are necessary for connecting each slave and module.
(1)
Power supply cable
This module is not directly connected to an external power supply; it shares the power supply connected
to the communication module.
The power cable is used to not only connect to the communication module, but to the receiving terminal
of each of the stacked modules as well.
(2)
Communication cable (LAN cable: shielded CAT5e or shielded CAT6)
Connects the master board and communication module of each of the slaves, or the communication
module of one of the slaves to that of another for Motionnet communication.
(3)
Device interface cables
● Encoder serial data communication cable
Connects the encoder serial data signal and encoder control output signal from the servo driver to the
J4 connector on the module.
● RS-232C cable
Connects a remote device and the J3 connector on the module when communication with an
RS-232C device is necessary.
The figure below shows the cable and power supply connections in a configuration where there is one motion
module and one absolute encoder input module stacked to an HMG slave.
Note that when using two or more modules of the same type, they must be stacked together, or arranged as
multiple slaves of each type of module.
Figure 3.13-3 Example of cable connection
F
12
B
A
CDE
6 57
8
9
0
34
F
12
B
A
CDE
6 57
8
9
0
34
RS-232C
RS-485
アブソリュートエンコーダ
サーボドライバ
DC24V
電源
motionCAT
上位装置より
motionCAT
下位装置へ
リミットセンサーより
各種装置
HM-S100C
モジュール
HM-P100C
モジュール
通信
モジュール
J4
J3
J4
J3
サーボドライバ
制御信号
From upper
motionCAT device
To lower
motionCAT device
DC24V power
supply
Servo driver
control signal
Communication
module
HM-S100C
module
HM-P100C
module
From limit sensor
Servo driver
RS-485
absolute encoder
Various devices
Summary of Contents for motionCAT HCPCI-MNT720M
Page 3: ......
Page 12: ...1 Warnings and Precautions...
Page 20: ...9 1 motionCAT Installation...
Page 109: ...98 4 Installation Guide...
Page 118: ...107 5 Device Driver Installation...
Page 122: ...111 6 Trial Operation...
Page 145: ...134 7 Accessories...
Page 147: ...136 8 Glossary...
Page 161: ...150 9 Connections to Drivers Supplied by Manufacturers...







































































