





























59
59
59
59
J17: Speaker connection jumper
If short, the amplifier output is connected to the built-in speaker.
J26: RX0 to INT4 connection
When short, the RX0 line of the CAN0 interface is connected to the INT4. This
allows the programmer to use the “wake-up” mode of the CPU CAN interface.
J27: RX1 to INT5 connection
When short, the RX1 line of the CAN1 interface is connected to the INT5. This
allows the programmer to use the “wake-up” mode of the CPU CAN interface.
J28: RX0, RX1 to INT4 connection
When short, the logical OR of the RX0 and RX1 line of both CAN interfaces is
connected to the INT4.
J25, J24: CPU CAN signals to CAN drivers connection jumpers
These jumper headers are intended to provide access to CPU’s CAN0 and
CAN1 interface signals. An user can disconnect these signals from the
PCA82C250 CAN bus transceivers and connect them to a CAN bus transceiver
of his own. The pinout of J25, J24 is following:
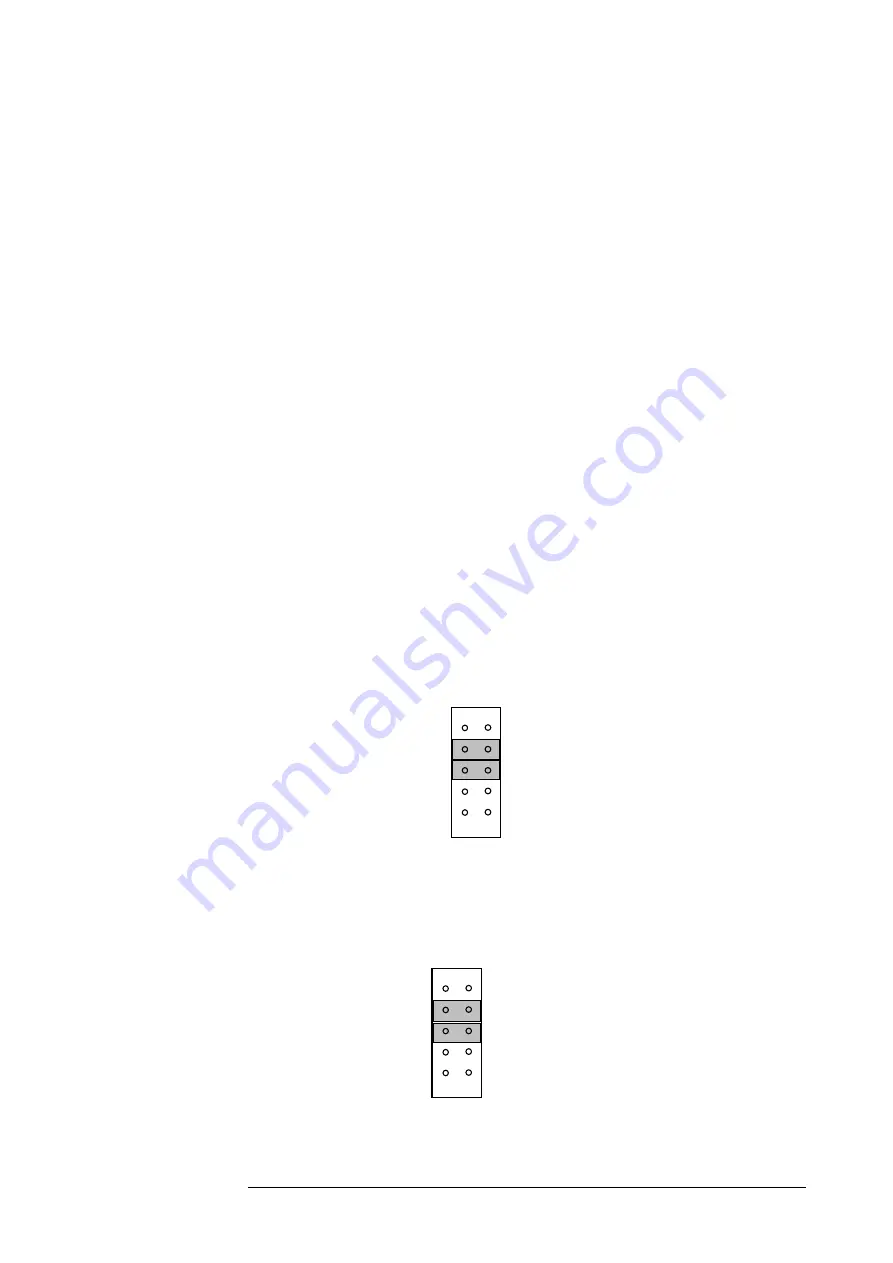
J25 pinout:
Factory default setting: 3-4 short, 5-6 short
The GND and VCC signals are provided as supply pins for the user-built CAN
transceiver.
J24 pinout:
CAN interface
jumpers:
GND 1
TX0 3
RX0 5
NC 7
VCC 9
2 GND
4 to CAN
0
6 from CAN
0
transiever
RxD
8 NC
10 VCC
GND 1
TX1 3
RX1 5
NC 7
VCC 9
2 GND
4 to CAN
1
6 from CAN
1
transceiver
RxD
8 NC
10 VCC







































































