





























SOLARDRIVE
PLUS
PROGRAMMING
GUIDE
68
/
107
2.6.5.
Limits Menu
2.6.5.1. Overview
The
Limits Menu
defines the current/torque limits applied to the control functions (IFD, VTC or FOC
controls) selected for the connected motor.
For IFD control,
current
limits are used. Three limit current levels are available, which are expressed as a
percentage of the motor rated current:
1) Current limit while accelerating;
2) Current limit at constant rpm;
3) Current limit while decelerating.
Two special parameters are also available; one sets the decrease of the limit current value when the motor
runs at constant power (flux weakening), while the other parameter disables the frequency decrease in case
of acceleration current limit (this is useful for inertial loads).
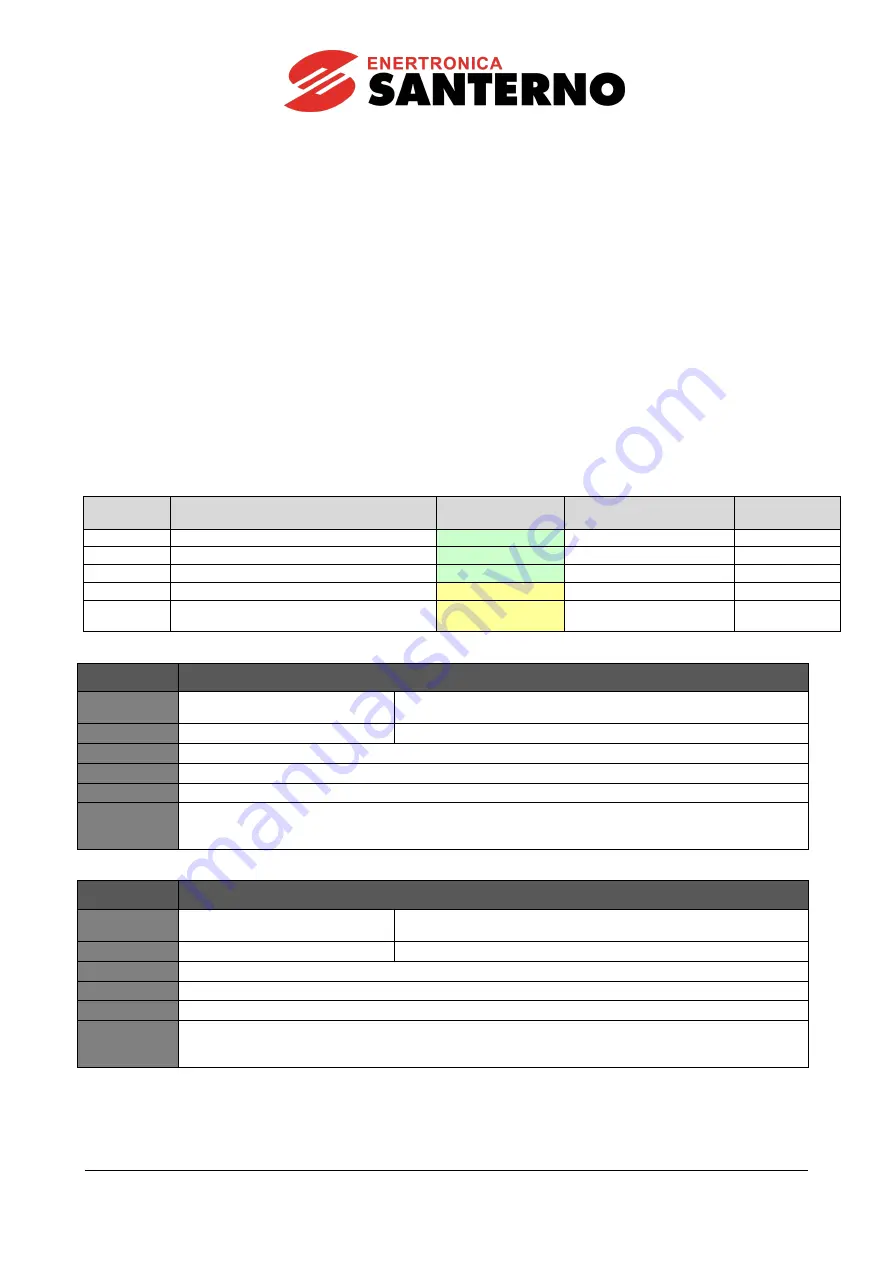
2.6.5.2. List of Parameters C043 to C050
Parameter
Function
User Level
Default Value
MODBUS
Address
C043
Current limit while accelerating
BASIC
150%
1043
C044
Current limit at constant rpm
BASIC
150%
1044
C045
Current limit while decelerating
BASIC
Depending on size
1045
C046
Current limit decrease in flux weakening
ADVANCED
0: Disabled
1046
C050
Frequency decrease during acceleration
limit
ADVANCED
0: Enabled
1050
C043
Current Limit while Accelerating
Range
0
400 (*)
0: Disabled
1.0%
400.0% (*)
Default
150
150%
Level
BASIC
Address
1043
Control
IFD
Function
This parameter defines the current limit while accelerating; it is expressed as a percentage of the
rated current of the motor.
No limit is applied if this parameter is set to 0: Disabled.
(*)
The maximum allowable value depends on the drive size.
C044
Current Limit at Constant rpm
Range
0
400 (*)
0: Disabled
1.0%
400.0% (*)
Default
150
150%
Level
BASIC
Address
1044
Control
IFD
Function
This parameter defines the current limit at constant rpm; it is expressed as a percentage of the rated
current of the motor.
No limit is applied if this parameter is set to 0: Disabled.
(*)
The maximum allowable value depends on the drive size.







































































