





























38
Section 8: Parameter Menu
User Instructions
MAN-02-04-60-0351-EN Rev. 3
Febraury 2019
Parameter Menu
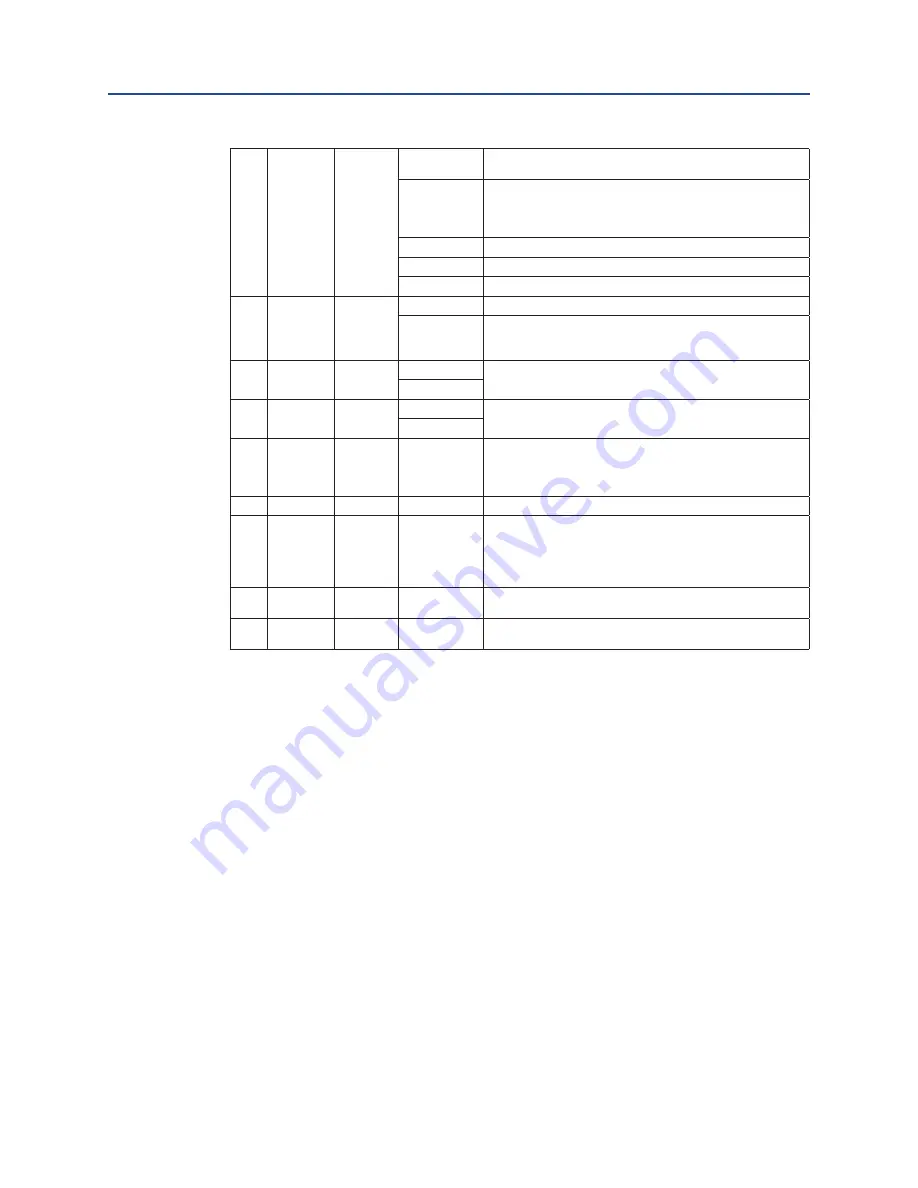
P1.4
End limit
Switch off
Close
by travel (1)
The actuator uses end-position signals to switch off
and report the end position.
by torque (1)
The actuator signals the end position or stops the motor only after
reaching the specified torque with the proviso that it has reached
the end position. If the end position signal is not reached,
the actuator reports an error.
by torque1 (2)
see P1.3
by torque2 (3)
see P1.3
by travel1 (4)
see P1.3
P1.5
End limit
Closing
direction
right (0)
Actuator is designed for clockwise = closing.
left (1)
Reverse direction of rotation! Counterclockwise = closing.
The crossing of all signals and commands is performed
by the controller.
P1.6
End limit
Rot. sense
pos.
0
Rotation sense of the Potentiometer. No function in
Bettis RTS CM series.
1
P1.7
End limit
LED
function
Close=green (0) Definition of the LED colour of the CLOSED or OPEN
end postion signalization.
Close=red (1)
P1.8
End limit
End limit
hyst
0,1 - 10,0%
Hysteresis range for end position signals: Example: End position
hysteresis 1% means, that the End position OFF is reached when
closing 0%, and will leave it when opening only at 1%, i.e.,
a re-closing can only take place after leaving this hysteresis.
P1.9
End limit
Ramp
0.1 - 100%
When approaching the end position, the speed is reduced.
P1.10 End limit
Range
0 - 100%
End position range for torque (P1.3, P1.4).
Permissible range in which the torque is to be
achieved. If the actuator comes to the end of the
end position range, the motor shuts off even if the
torque has not been reached.
P1.11 End limit
Overrun
Open
0 - 60 s
Switch-off delay after reaching the end position see
travel1 (P1.3, P1.4)
P1.12 End limit
Overrun
Close
0 - 60 s
Switch-off delay after reaching the end position
travel1 (P1.3, P1.4)
1)
representative for CM03







































































