





























While connecting the STEP/DIR signals to the drive (both servo and stepper drives) pay attention which
STEP edge is active. The active edge in the CSMIO/IP-M is the leading edge – namely change of the STEP+
signal from the logic “0” state (0V) to logic “1” (5V).
While connecting the controller– e.g. for the M542 stepper motor you should connect the PUL+ signal to
the 5V power and CSMIO/IP-M STEP output to the PUL- of the drive. This way – switching on the
optocoupler in the M542 will be followed by the leading edge of the CSMIO/IP-M STEP signal. If the
connection is incorrect, 1 step will be lost during every direction change. After a long cycle, it may
accumulate a large position error.
10.8
Configuration of motion directions, homing and software limits
When the axes are scaled and set, it is important to
set correct directions. Useful function is possibility
to indicate the software limits - the machine working
range.
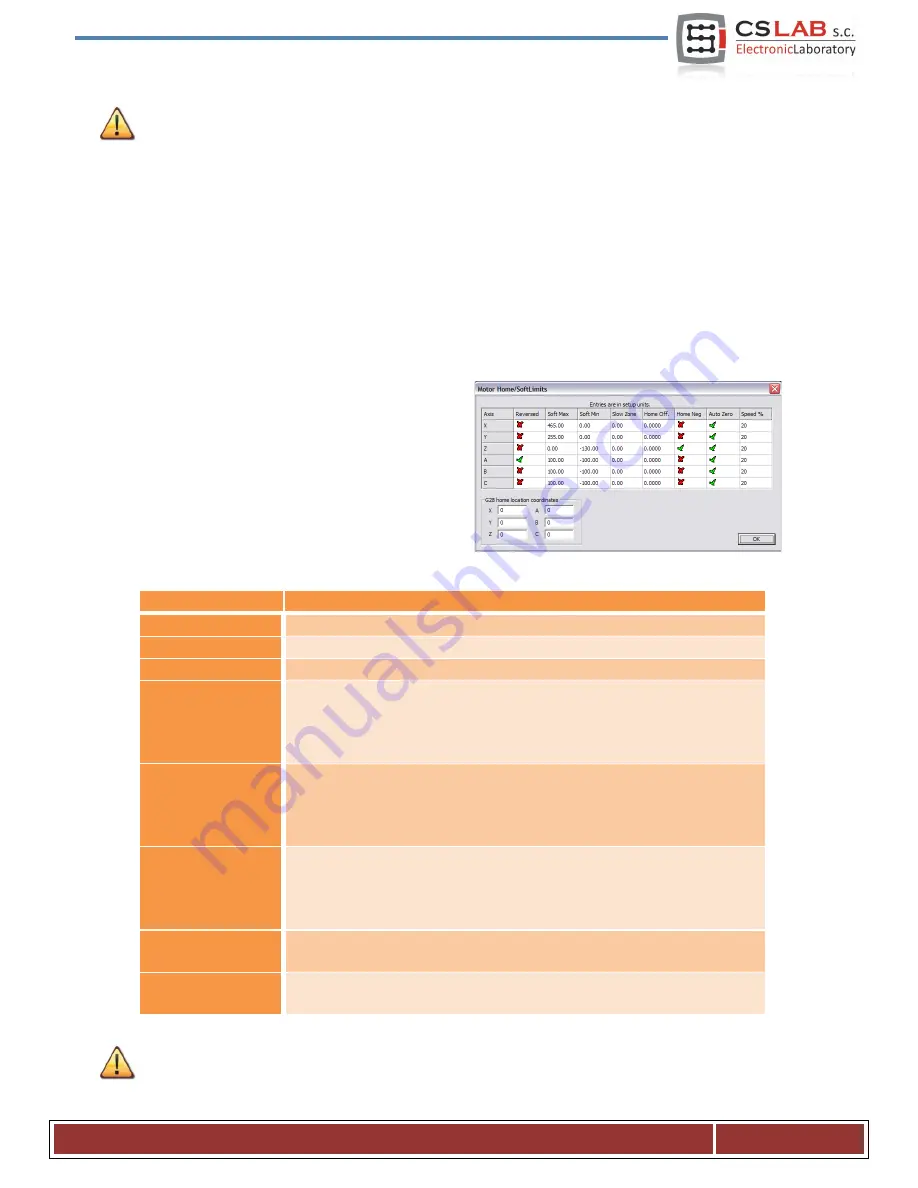
Select from the menu the „Config/Homing/Limits”
position. In the window, we have these configuration
parameters for each axis:
Column name
Description
Reversed
Switching on or off this box, you cause direction change of axis motion.
Soft Max
Maximum range of motion in positive direction
Soft Min
Maximum range of motion in negative direction
Slow Zone
In the CSMIO/IP-M, this box is unused. Using the LPT, it is used to define the
section for braking near the end of working range. CSMIO/IP-M controller
automatically calculates the braking distance including defined for the axis
acceleration. It is best to enter 0 in this box.
Home Off.
Starting with software v1.07 version –if the switch is placed at any other
position than at the extreme end the distance can be entered in the Home
Off . This tells Mach3 to set the Machine Coordinate for the axis to this value
instead of zero.
Home Neg
Normally the homed axis is in negative direction. Z-axis however is usually
homed to the top, and move-down is usually motion in negative direction.
Therefore, you have to home the Z-axis in positive direction. Home Neg is to
choose homing direction.
Auto Zero
This area is not used on the CSMIO/IP-M controller. After homing – the axis is
always zero.
Speed %
Homing speed. It is shown as percent of maximum speed defined in the
„Motor Tuning”. For the first tests, we recommend 10%.
Attention! – you can switch the software limits on and off. If they are switched off, the program cannot
control the working area overrun. The only securities are the hardware LIMIT switches.
C S - L a b s . c . – C N C C S M I O / I P - M c o n t r o l l e r
Page 45







































































