

















Version 3.0.0 Preliminary Documentation – May be Subject to Change 44-46
4.2. 18
Digital
Input
Fault Mode Behaviour
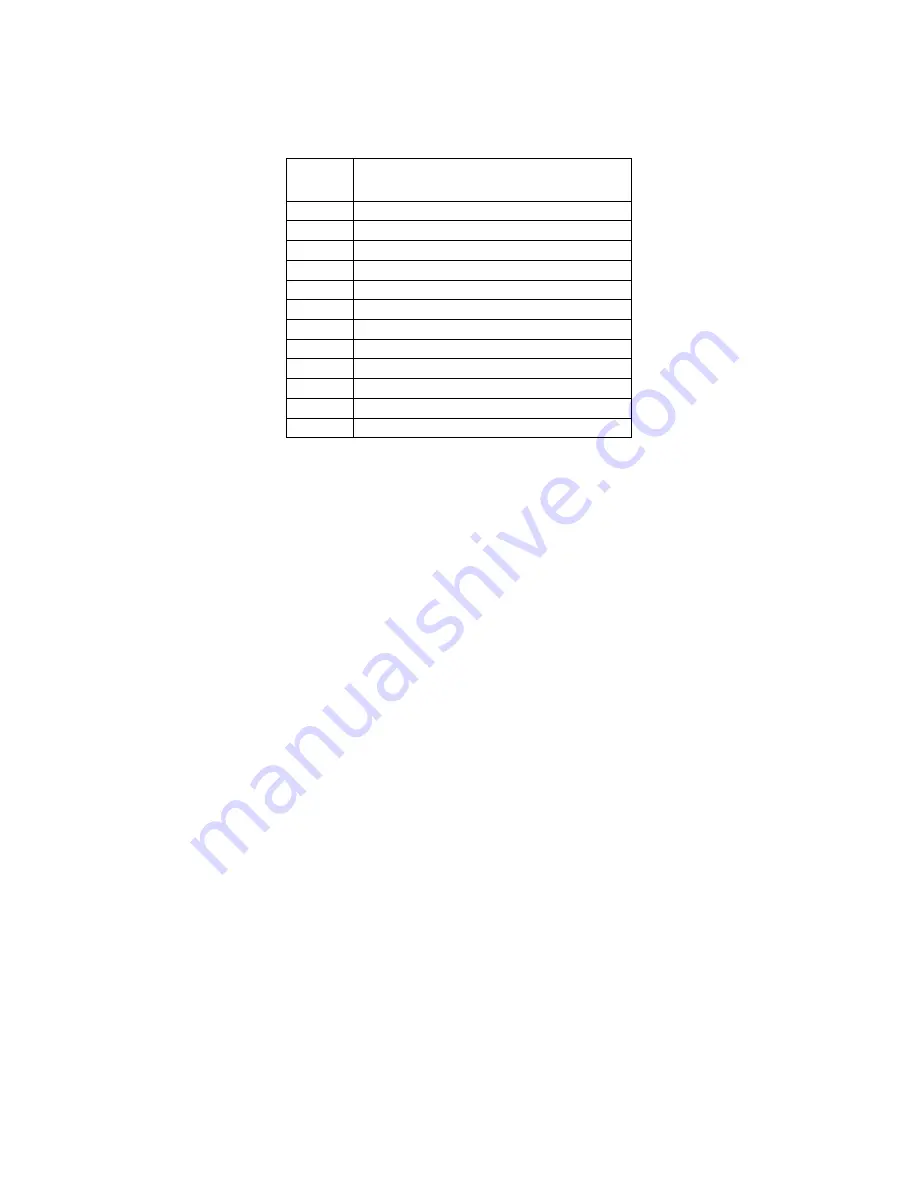
The objects associated with the error response in the 18 Digital Input are listed in the following
table. See section 3 for a detailed description of each object.
Index
(hex)
Object
1001 Error
Register
1003
Pre-Defined Error Field
1029 Error
Behaviour
2010
AI Error Minimum
2080
AI Error Maximum
20A0
AI Enable Error Check 8 Inputs
20B0
AI Error Response Delay
4000
FD Field Value
4001
FD Set Threshold
4002
FD Clear Threshold
400A
FD Enable Error Check 8 Faults
400B
FD Error Response Delay
If at any time there is an active fault on the 18 Digital Input, bit 1 (Generic Error) of the Error
Register will be set. If and only if there are no active faults will this bit be clear.
If a heartbeat or life-guard event is detected, then the controller will add the appropriate error code
(see section 4.1) to the top of the list in object 1003h. The “channel” portion of the error code will
contain the node ID of the module that failed to send the heartbeat/life guard message within the
expected time. The controller will check subindex 1 (communication) of object 1029h to see if it has
to change state.
All other faults that the 18 Digital Input can detect are related to the onboard I/O. Each type of I/O
has an object call “Error Response Delay” associated with the various I/O channel. Upon reset of
the controller, all possible faults that can be detected by the 18 Digital Input are in the inactive
state. When a fault is first detected, it enters an error pending state, and a timer is loaded with the
delay time. For a fault to become active, it must remain present until the timer has decremented to
zero. If at any time during the delay period the fault is cleared, the fault reverts back to the inactive
state, and the delay timer stops. (It is only active while an error is pending.) If the fault is still
present when the timer has elapsed, then the fault enters the active state, and the appropriate
error code (see section 4.1) is add to the top of the list in object 1003h. For AI and FD faults, the
controller will check subindexes 3 and 6 respectively of object 1029h to see if it has to change bus
state.







































































