



















FBL2360 Brushless DC Motor Controller Datasheet
11
RS485 Communication
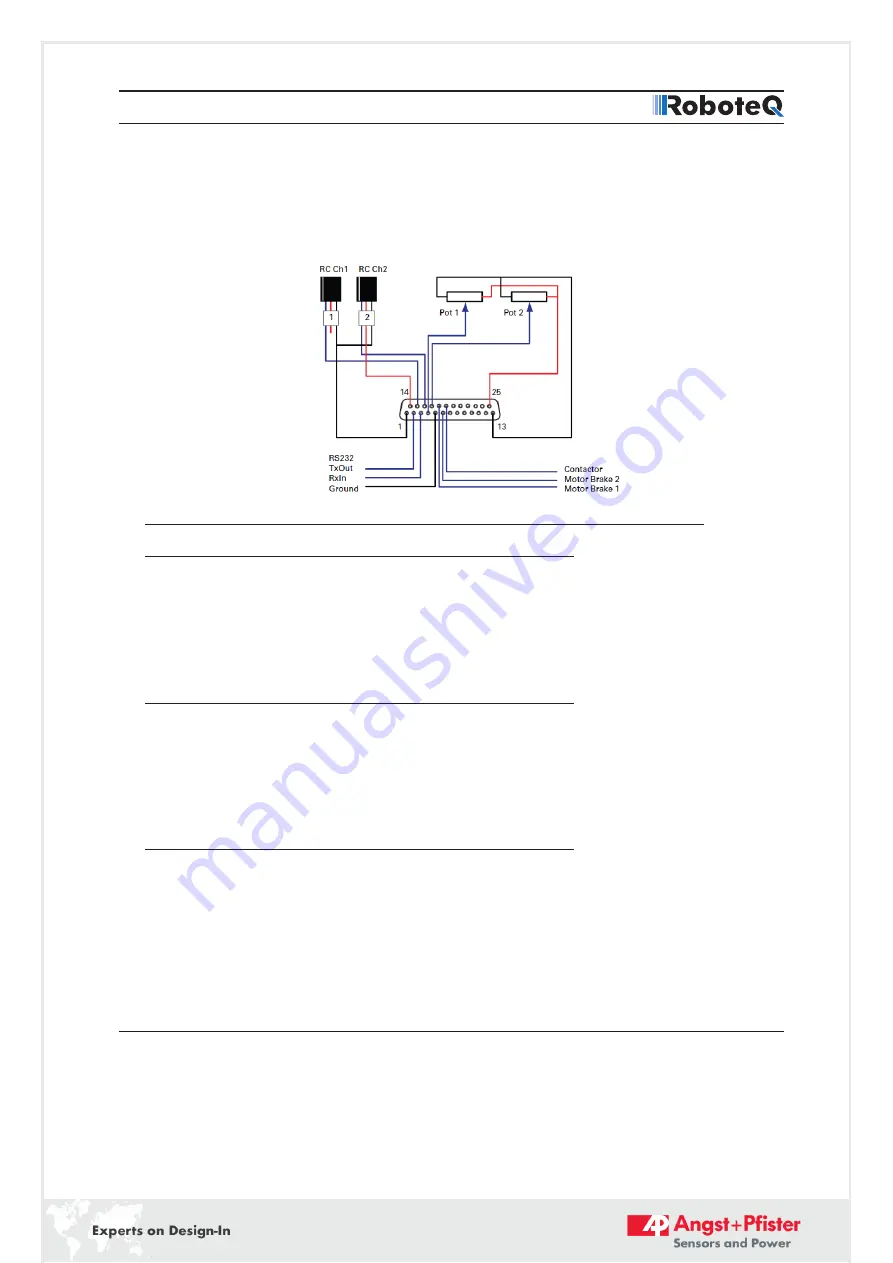
how to connect two outputs to motor brake solenoids and another output to an external
status LED. You may omit any connection that is not required in your application. The
controller automatically arbitrates the command priorities depending on the presence of a
valid command signal in the following order: 1-RS232, 2-RC Pulse, 3-None. If needed, use
the PC Utility to change the pin assignments and the command priority order.
FIGURE 10. Factory default pins assignment
Enabling Analog Commands
For safety reasons, the Analog command mode is disabled by default. To enable the
Analog mode, use the PC utility and set Analog in Command Priority 2 or 3 (leave Serial as
priority 1). Note that by default the additional securities are enabled and will prevent the
motor from starting unless the potentiometer is centered, or if the voltage is below 0.25V
or above 4.75V. The drawing shows suggested assignment of Pot 1 to ANA1 and Pot 2 to
ANA4. Use the PC utility to enable and assign analog inputs.
USB Communication
Use USB only for configuration, monitoring and troubleshooting. USB is not a
reliable communication method when used in an electrically noisy environments and
communication will not always recover after it is lost without unplugging and replugging
the connector, or restarting the controller. Always prefer RS232 communication when
interfacing to a computer. USB and CAN can operate at the same time on the FBL2360.
Plugging USB to a computer will not disable CAN interface.
RS485 Communication
RS485 is an industry standard for defining serial communication. Due to its balanced
signalling, RS485 is effective over distances, even if other electrical signals are present.
Its stability makes it well suited to connect multiple receivers to a single network.
You can operate RS485 in half-duplex mode and it is well suited for use with the Modbus
protocol. On the 25-pin connector, RS485+ and RS485- pins are present.
11
FBL2360_1691-21588-0001-D-0720







































































