





























140
Rockwell Automation Publication 2097-UM001D-EN-P - November 2012
Chapter 6
Configure and Start Up the Kinetix 300 Drive
Tune the Axis
Follow these steps to tune the axes.
1.
Verify the load is removed from the axis you want to tune.
2.
Run the MotionView OnBoard software.
3.
Select General.
4.
From the Drive Mode pull-down menu, choose Auto Tune.
5.
Select Dynamics.
The current velocity and position gains, position limit, and scaling are
displayed.
6.
If you are using an linear incremental encoder with a resolution greater
than one micron, do the following. Otherwise continue with the next step.
a. Set FeedBack Filter to Yes.
b. Set the time constant to 1 ms.
7.
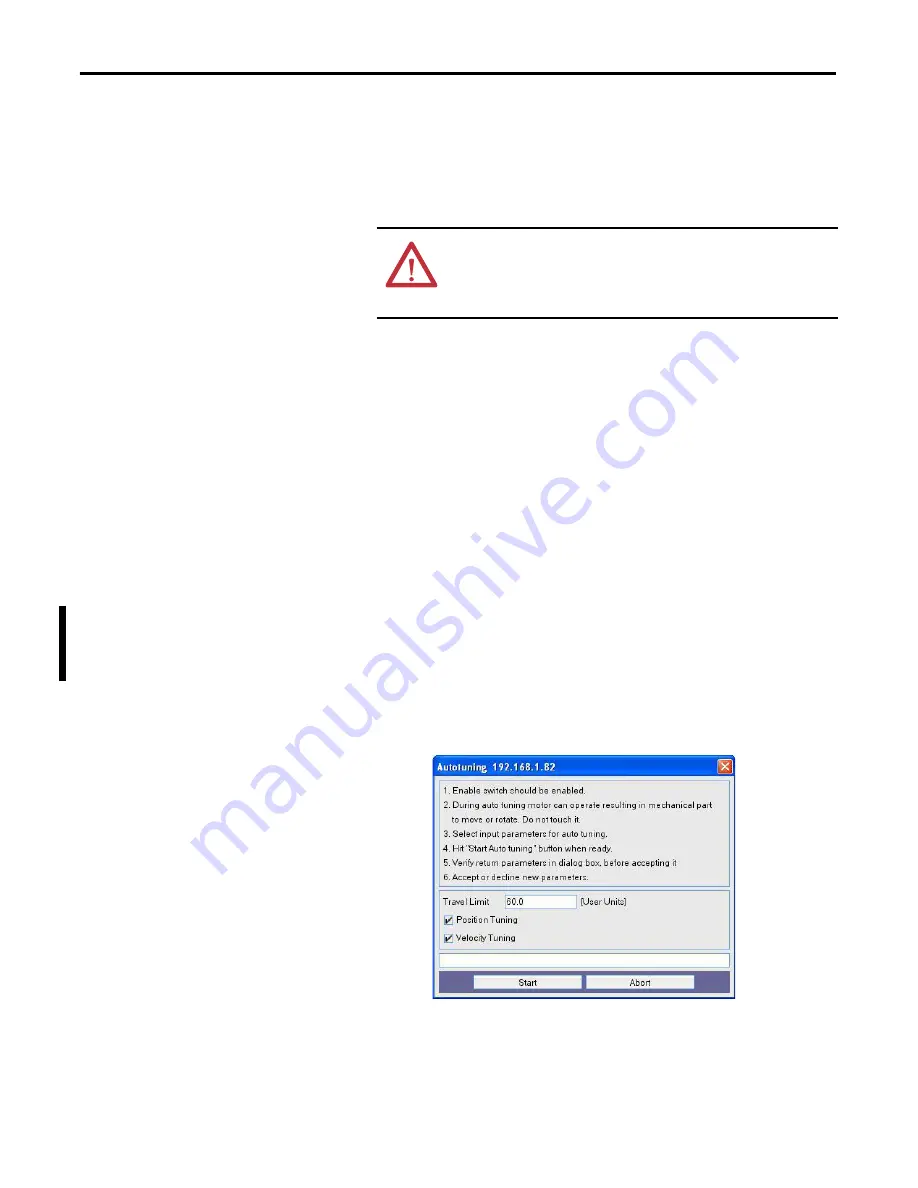
Click Autotuning.
The Autotuning dialog box opens.
8.
Check desired Tuning boxes (Velocity/Position or both).
9.
Enter the Travel Limit.
ATTENTION:
To reduce the possibility of unpredictable motor response
tune your motor with the load removed first, then re-attach the load
and preform the tuning procedure again to provide an accurate
operational response.
TIP
To reduce the audible noise when a LDAT-Series linear thruster with an
absolute encoder option is under servo control, we recommend that you use a
low-pass filter with the cut-off frequency set to 150 Hz. You can set up the
filter in the Dynamics category.