





























2 MECHATROLINK-
III
Communications
2.4.3 Detailed Description of Commands Used in the Operation Sequence
2-10
(4) SENS_ON Command
This command turns ON the power supply to the motor’s encoder and obtains the position data.
Confirm that RCMD is SENS_ON (23 hex) and CMD_STAT.CMDRDY is 1 to confirm that execution of the
SENS_ON command has been completed.
Confirm that SVCMD_STAT.POS_RDY is 1 to confirm that the position data was successfully obtained.
If SVCMD_STAT.POS_RDY is 0, the position data was not obtained correctly.
Output an error signal as an alarm from the host controller.
The spindle motor uses an incremental encoder, so the position is 0 when the power supply is turned ON.
Servomotors use absolute encoders, so the SENS_ON command must be used to read the position data from
the absolute encoder and set the machine coordinate system in the SERVOPACK. In this case, the machine
coordinates are set based on the position detected by the absolute encoder and the offset of the absolute
encoder origin (i.e., the offset value between the encoder coordinates and the machine coordinates as set in the
SERVOPACK parameters).
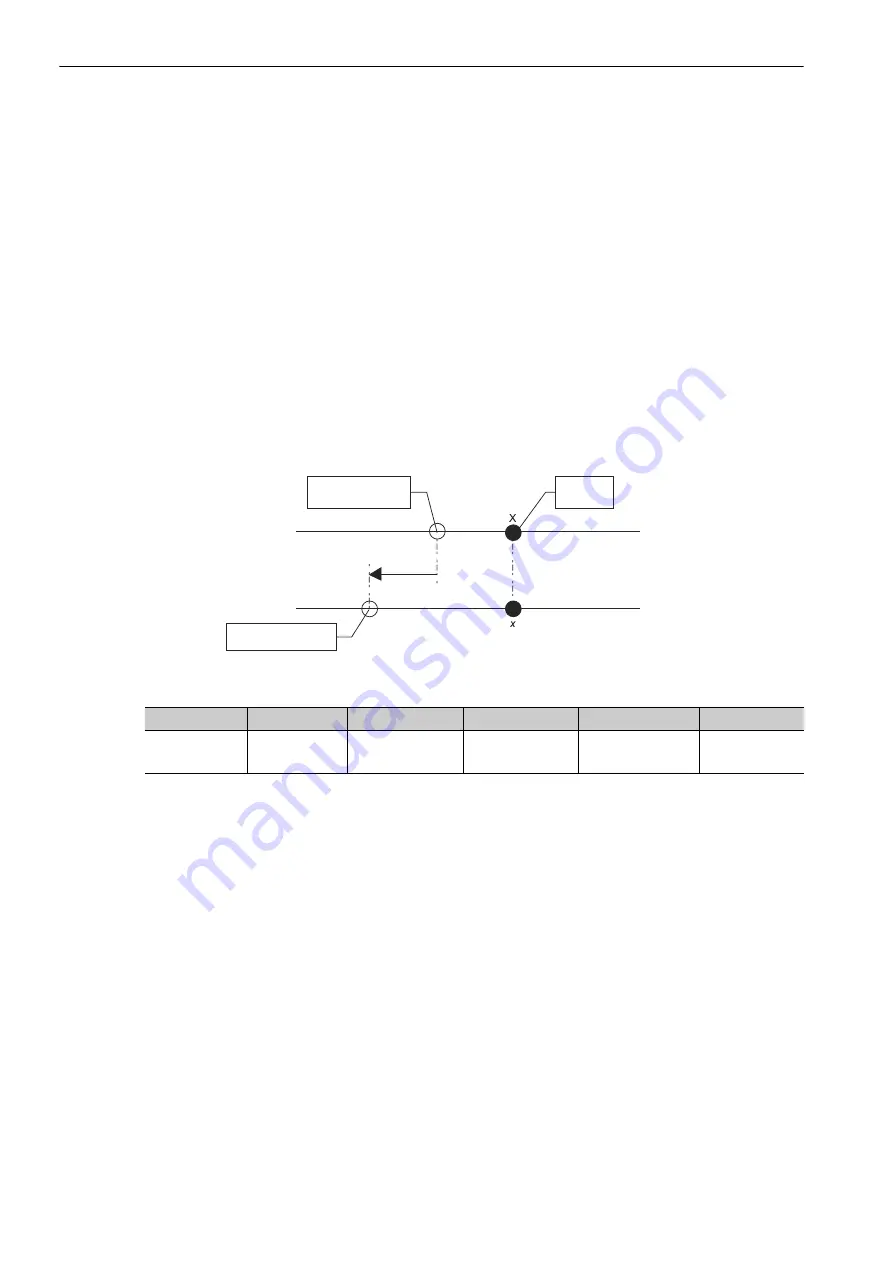
The relationships between the machine coordinates (CPOS and APOS), the encoder coordinates, and the abso-
lute encoder origin offset are shown in the following figure.
CPOS: Command position
APOS: Feedback position
(5) SV_ON Command
This command turns ON the power to the motor.
When the control power and main circuit power supply are turned ON, SVCMD_STAT.PON changes to 1.
When the SENS_ON command is sent, SVCMD_STAT.POS_RDY changes to 1 and the position can be read
from the SERVOPACK correctly.
When PON and POS_RDY change to 1, the motor is ready to receive power and SVCMD_STAT.M_RDY
changes to 1.
Confirm that SVCMD_STAT.M_RDY is 1 and then send the SV_ON command from the host controller.
If SVCMD_STAT.M_RDY is 0, one of the following may have occurred.
• An alarm occurred (COM_ALM is 8 hex or higher, or D_ALM is 1).
• SVCMD_STAT.PON is 0 (the main circuit power supply is OFF).
• An absolute encoder is used and execution of the SENS_ON command has not completed.
• SVCMD_IO.ESPT is 1 (the HWBB signal is OFF).
• The SERVOPACK parameters have been initialized.
(6) Starting Operation
After the servo is turned ON, you can send commands to operate the motor.
To operate the motor for a feed or spindle axis, refer to
Chapter 4 Feed Axis Operation
or
Chapter 5 Spindle
Axis Operation
.
Parameter
Setting Range
Setting Unit
Factory Setting
When Enabled
Classification
Pn808
-1073741823 to
1073741823
Reference units
0
Immediately
Setup
Machine coordinates
(CPOS and APOS)
Machine
coordinate origin
Current
position X
Encoder origin
X = x + Common parameter 23 (Pn808)
Common parameter 23 (Pn808): Absolute Encoder Origin Offset
Common Parameter 23
(Pn808)
Encoder coordinate
Содержание E-V-SD Series
Страница 18: ...1 1 Application Overview 1 Application Overview This chapter provides an overview of product applications...
Страница 176: ...9 2 Servo Tracing 9 9 Monitoring Servo Trace Waveform Cursor based Time Measurements...
Страница 177: ...9 Monitoring 9 10 Waveform Overlay Trigger Condition Settings...