





























Operation Manual 37107F
MFR 3 - Multi Function Relay
Page 40/165
© Woodward
1.
Controller operated as a P-only controller
(where T
n
=
∞
[Parameter setting: T
n
= 0], T
V
= 0).
2.
Increase gain K
PR
(P gain) until the control loop oscillates continuously at K
P
= K
Pcrit
CAUTION
If the engine starts to oscillate uncontrollably, perform an emergency shutdown and alter the screen
setting accordingly.
3.
At the same time: measure the critical cycle duration T
crit
.
4.
Set the parameters:
PID controller
PI controller
K
PR
= 0.6
× K
Pcrit
K
PR
= 0.45 × K
Pcrit
T
n
= 0.5
× T
crit
T
n
= 0.83 × T
crit
T
V
= 0.125 × T
crit
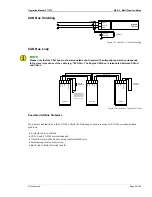
Step response
Controller setting
Optimum (x
m
≤
10 %)
Controller setting
T
crit
Uncontrolled oscillation of generator
Controller setting wrong
0
1
x
0
t/s
0
0
1
x
t/s
0
1
x
0
t/s
Figure 4-6: Step response - controller setting
P-gain
Kpr = 000
P gain
(K
PR
) Proportional action coefficient
1 to 240
The proportional-action coefficient K
PR
indicates the closed-loop control system
gain. By increasing the gain, the response is increased to permit larger corrections
to the variable to be controlled. The farther out of tolerance the process is the larger
the response action is to return the process to the tolerance band. If the gain is con-
figured too high, the result is excessive overshoot/undershoot of the desired value.
Reset time
Tn = 00,0s
Reset time
(T
n
)
0.2 to 60.0 s
The reset time T
n
represents the I-component of the PID controller. The reset time
corrects for any offset (between setpoint and process variable) automatically over
time by shifting the proportioning band. Reset automatically changes the output re-
quirements until the process variable and the setpoint are the same. This parameter
permits the user to adjust how quickly the reset attempts to correct for any offset.
The reset time constant must be greater than the dirivitive time constant. If the reset
time constant is too small, the engine will continually oscilate. If the reset time con-
stant is too large, the engine will take to long to settle at a steady state.
Rate time
Tv=0,00s
Rate time
(T
V
)
0.00 to 6.00 s
The derivative-action time T
V
represents the D-component of the PID controller.
By increasing this parameter, the stability of the system is increased. The controller
will attempt to slow down the action of the throttle in an attempt to prevent exces-
sive overshoot
or undershoot. Essentially this is the brake for the process. This por-
tion of the PID loop operates anywhere within the range of the process unlike reset.





















































