





























62
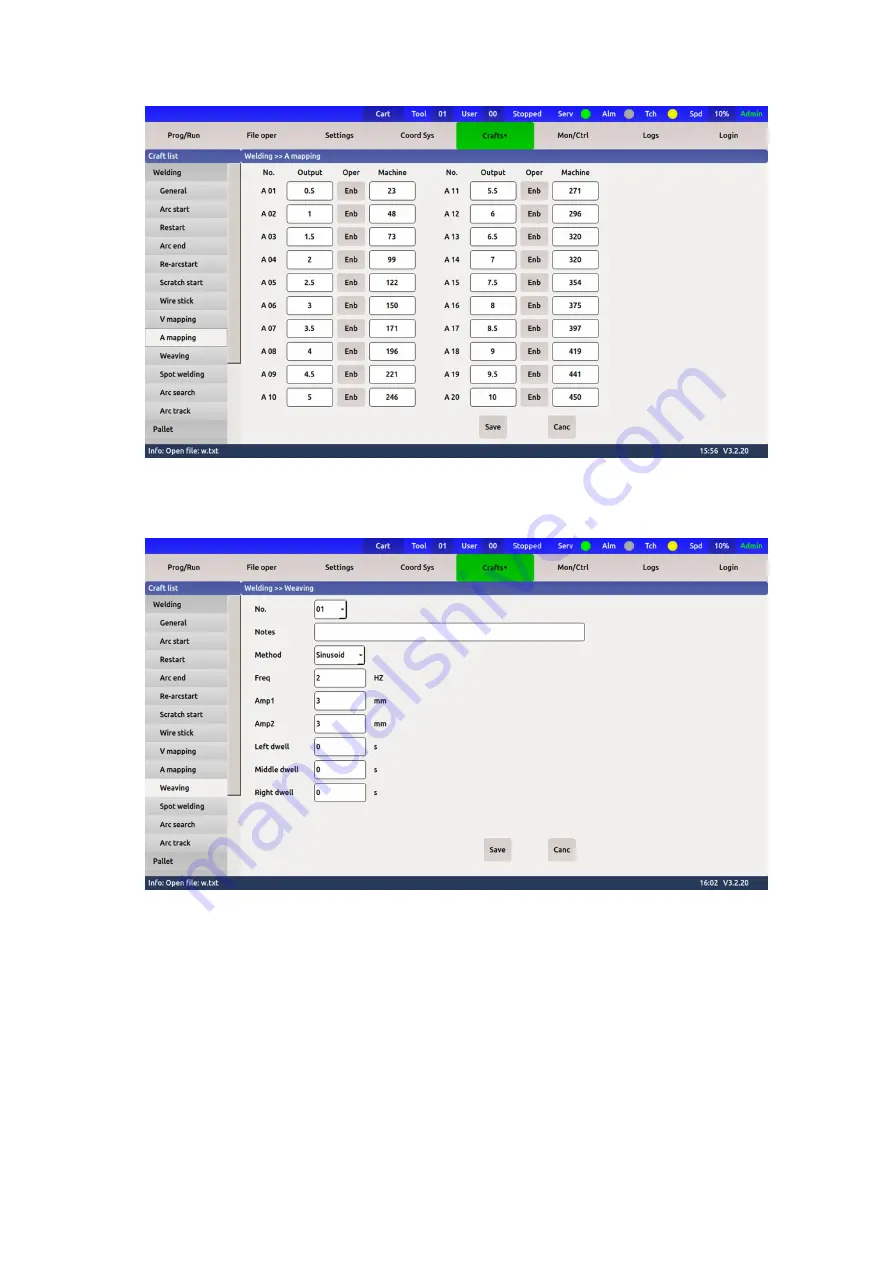
Figure 5-3 Welding current matching
Swing arc setting: During the welding process, the robot can swing the welding gun,
which can achieve special welding process requirements and optimize the welding seam
formation. The following figure:
Figure 5-4 Swing arc setting
In the "Swing arc setting" column, enter the values of "Swing mode", "Swing
frequency", "Swing amplitude", "Left dwell time" and "Right dwell time", and then press
Exit (Save).
Ø Swing setting: used to set the swing mode, such as "Z-shaped pendulum", "arc
pendulum" and "sinusoidal pendulum".
Ø Swing frequency: Set the number of swings per second.
Ø Swing amplitude: Set the distance of one-side swing.
Ø Left stay time: set the stay time when swinging to the left vertex
Ø Right stay time: set the stay time when swinging to the right vertex
Note: After setting the swing parameter, save it in the form of file number. When in
use, the corresponding parameter number can be called, and multiple sets of welding swing
arc parameters can be used in one program.
Содержание TKB80306
Страница 1: ...Shanghai Turing Intelligent Manufacturing Robot Co LTD ...
Страница 6: ...IV IV 8 2 Common faults and treatment 82 ...
Страница 52: ...46 Figure 3 49 Sorting files ...
Страница 56: ...50 Figure 4 4 System V variables Figure 4 5 System S variables ...
Страница 79: ...73 Figure 6 8 Log print settings ...


































































