




























70
6.1.4 Spatial parameters
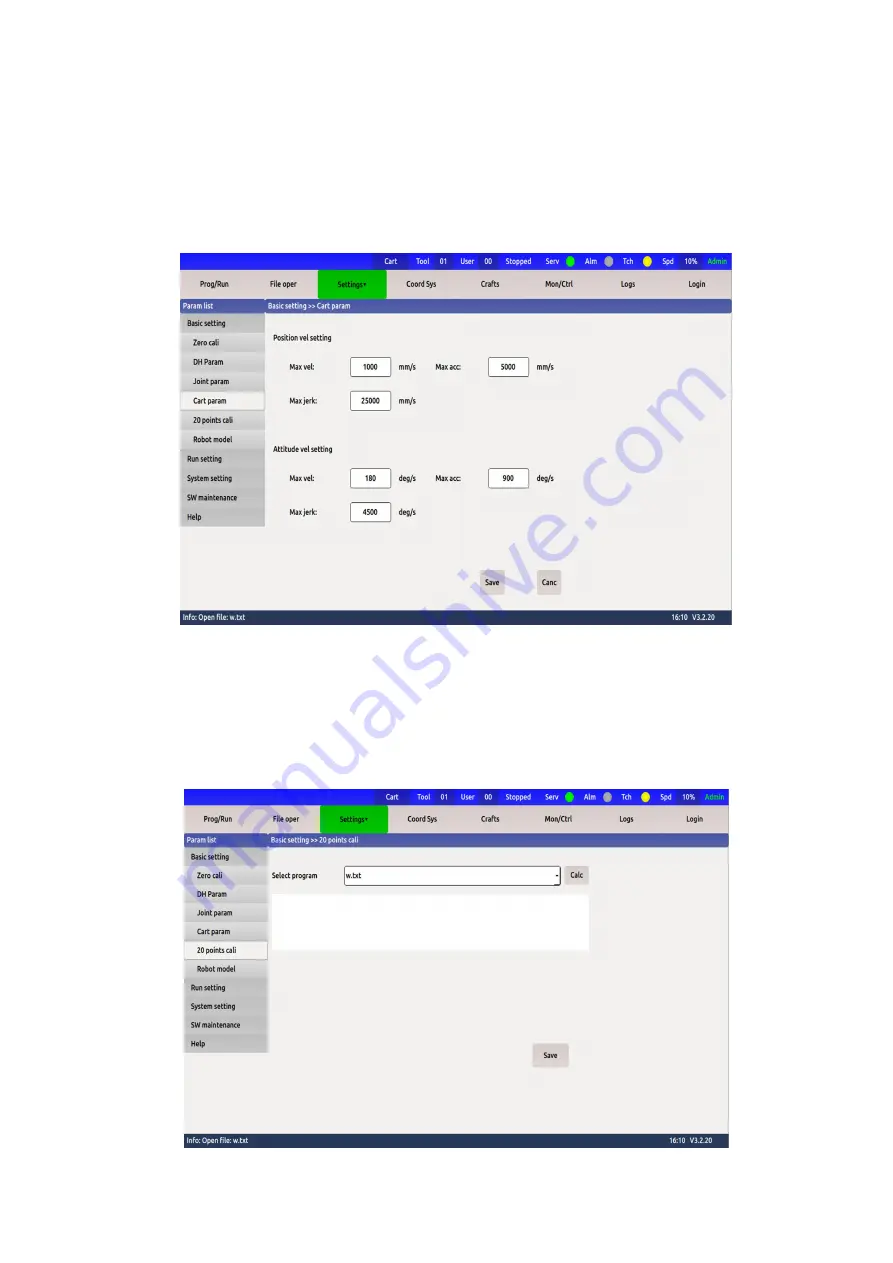
The space parameter sets the linear running speed of the robot. When running along
the Cartesian coordinate system, it involves attitude changes and requires multi-axis
coordination. Therefore, the customer cannot modify it by himself, otherwise an overspeed
alarm will occur, and the robot will be damaged in severe cases, or the trajectory will
change and hit the surrounding equipment.
Figure 6-4 Spatial parameters
6.1.5 Twenty points calibration
If the robot loses the zero point, not only the zero position must be calibrated
manually, but also the robot needs to be calibrated at 20 points to calibrate the zero
position and the link error. Customers are generally not allowed to calibrate 20 points by
themselves. The interface is shown below:
Содержание TKB80306
Страница 1: ...Shanghai Turing Intelligent Manufacturing Robot Co LTD ...
Страница 6: ...IV IV 8 2 Common faults and treatment 82 ...
Страница 52: ...46 Figure 3 49 Sorting files ...
Страница 56: ...50 Figure 4 4 System V variables Figure 4 5 System S variables ...
Страница 79: ...73 Figure 6 8 Log print settings ...







































































