





























11
◆
Cartesian coordinate system
The center of the end flange of the robot runs in the set X, Y, and Z directions.
◆
Tool coordinate system
The tool coordinate system is located at the center of the tool and is defined by the
user. The effective direction of the fixture is defined as the Z axis of the tool coordinate
system.
◆
User coordinate system
The user coordinate system is located on the working platform of the robot and is
defined by the user.
2.2.1 Joint coordinate system
See 2.1.1 for the definition of robot joint motion axis.
When the current coordinate system is set to the joint coordinate system, the teach
pendant operates the 6 axes of the robot in the positive and negative directions. Press the
J1-J6 operation buttons, and the industrial robot will move in the direction corresponding
to the schematic diagram.
In the coordinate system, select the
【
positioner
】
coordinate system, then press the
J1-J3 axis operation button, the action will be the external three axes.
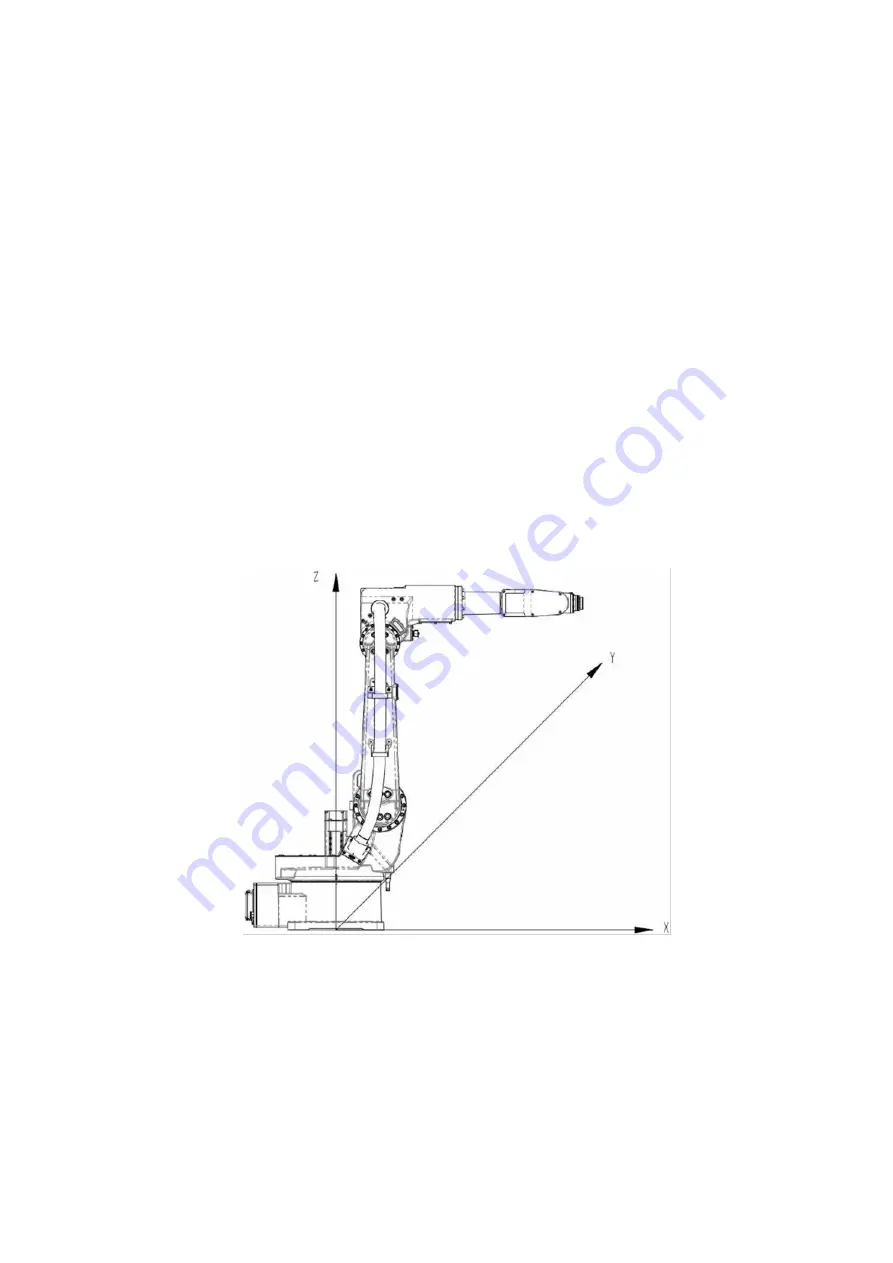
2.2.2 Cartesian coordinate system
Figure 2-4 Cartesian coordinate system
The origin of the Cartesian coordinate system is defined on the axis of the robot 1 axis,
and it intersects with the base mounting table.
The direction of the rectangular coordinate system is specified: the X axis direction is
forward, the Z axis direction is upward, and the Y axis is determined according to the
right-hand rule. (The direction of the cable socket on the robot base is the rear, and the
direction of the robot flange is the front)
In the Cartesian coordinate system, the motion of the robot refers to the motion of the
central point controlled by the robot. When the axis operation key is pressed, the
coordinate point is controlled to move along or around the world coordinate axis. The
Содержание TKB80306
Страница 1: ...Shanghai Turing Intelligent Manufacturing Robot Co LTD ...
Страница 6: ...IV IV 8 2 Common faults and treatment 82 ...
Страница 52: ...46 Figure 3 49 Sorting files ...
Страница 56: ...50 Figure 4 4 System V variables Figure 4 5 System S variables ...
Страница 79: ...73 Figure 6 8 Log print settings ...


































































