






















Technosoft 2016
11
iPOS4808 MY-CAN-STO/-CAT-STO Technical Reference
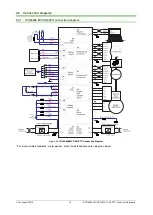
2.4 Supported Motor-Sensor Configurations
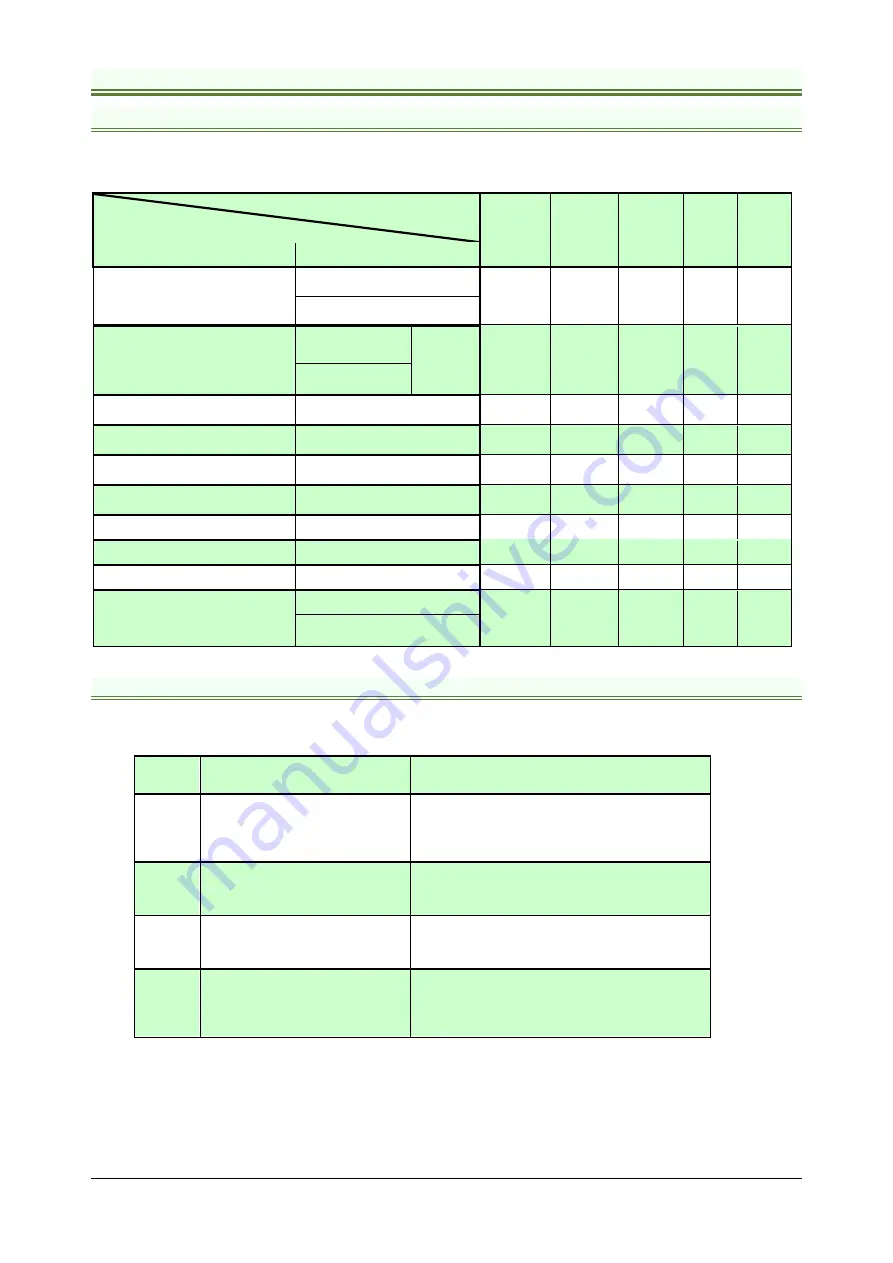
2.4.1
Single loop configurations
The position and/or speed are controlled using one feedback sensor. The other available feedback sensor
input can be used for External reference Position or Velocity, Pulse and Direction, Electronic Gearing or Camming.
Motor
Sensor
Brushless
PMSM
Brushless
BLDC
DC Brush Stepper
2 phase
Stepper
3 phase
Sensor type
Sensor location
Incr. encoder
FDBK #1 (single ended or diff.)
Yes
-
Yes
Yes
-
FDBK #2 (diff.)
Incr. e Digital Hall
FDBK #1 (single
ended or diff.)
Digital
halls
interface
Yes
Yes
-
-
-
FDBK #2 (diff.)
Digital halls only
Digital halls interface
Yes
-
-
-
-
Linear halls (analogue)
Linear halls interface
Yes
-
-
-
-
SSI
FDBK #2 (diff.)
Yes
-
Yes
Yes
-
BiSS-C
FDBK #2 (diff.)
Yes
-
Yes
Yes
-
Analogue Sin/Cos encoder
FDBK #1 (diff.)
Yes
-
Yes
Yes
-
Tacho
Analogue input: Feedback
-
-
Yes
-
-
Open-loop (no sensor)
-
-
-
-
Yes
Yes
Open-loop (with step loss detection
using
Incr. Encoder/SinCos/SSI/BiSS)
FDBK #1 (single ended or diff.)
-
-
-
Yes
Yes
FDBK #2 (diff.)
2.4.2
Dual loop configurations
The motor speed control loop is closed on one feedback connected on the motor while the motor position
control loop is closed on the other available feedback which is placed on the load. There is usually a transmission
between the load and the motor.
Motor
type
Feedback #1
Feedback #2
PMSM
•
Incremental encoder
(single-ended or differential)
•
Analogue Sin/Cos encoder
•
Linear Halls (only on motor)
•
Incremental encoder
(differential)
•
SSI/BiSS C encoder
BLDC
•
Incremental encoder
(single-ended or differential) +
Digital halls
•
Incremental encoder
(differential) + Digital Halls
•
SSI/BiSS C encoder (only on load)
Stepper
2ph
•
Incremental encoder
(single-ended or differential)
•
Analogue Sin/Cos encoder
•
Incremental encoder
(differential)
•
SSI/BiSS C encoder
DC
Brush
•
Incremental encoder
(single-ended or differential)
•
Analogue Sin/Cos encoder
•
Analogue Tacho (only on motor)
•
Incremental encoder
(differential)
•
SSI/BiSS C encoder
Each defined motor type can have any combination of the supported feedbacks either on motor or on load.
Example:
-PMSM motor with Incremental encoder (from feedback #1) on motor and Incremental encoder (from feedback#2)
on load
-DC brush motor with SSI encoder (from feedback #2) on motor and Sin/Cos encoder (from feedback #1) on load.







































































