







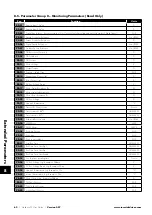





















9.3.4. Default PDO Mapping
Table 2: PDO Default Mapping
Type
Objects No. Mapped Object
Length
Mapped Function
Transmission
RX
PDO 1
1
2000h
Unsigned 16
Control command register
254
Valid immediately
2
2001h
Integer 16
Speed reference
3
2002h
Integer 16
Torque reference
4
2003h
Unsigned 16
User ramp reference
TX
PDO1
1
200Ah
Unsigned 16
Drive status register
254
Send after receiving
RX PDO1
2
200Bh
Integer 16
Motor speed Hz
3
200Dh
Unsigned 16
Motor current
4
200Eh
Integer 16
Motor torque
SDO (RX)
Error Control
1
0006h
Unsigned 16
Dummy
254
2
0006h
Unsigned 16
Dummy
3
0006h
Unsigned 16
Dummy
4
0006h
Unsigned 16
Dummy
TX
PDO2
1
200Fh
Unsigned 16
Motor power
254
2
2010h
Integer 16
Drive temperature
3
2011h
Unsigned 16
DC bus value
4
200Ch
Integer 16
Motor speed (Internal data format)
* Drive control can only be achieved when P1-12=6
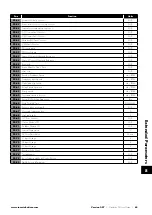
9.3.5. Supported PDO Transmission Types
Various transmission modes can be selected for each PDO.
For RX PDO, the following modes are supported:
Table 3: RX PDO Transmission Mode
Transmission Type
Mode
Description
0 – 240
Synchronous
The received data will be transferred to the drive active control register when the
next sync message is received.
254, 255
Asynchronous
The received data will be transferred to the drive active control register
immediately without delay.
For TX PDO, the following modes are supported:
Table 4: TX PDO Transmission Mode
Transmission Type
Mode
Description
0
Acyclic synchronous
TX PDO will only be sent out if the PDO data has changed and PDO will be
transmitted on reception of SYNC object.
1 - 240
Cyclic synchronous
TX PDO will be transmitted synchronously and cyclically. The transmission type
indicates the number of SYNC object that are necessary to trigger TX PDO.
254
Asynchronous
TX PDO will only be transferred once corresponding RX PDO has been received.
255
Asynchronous
TX PDO will be transferred at anytime following a PDO data value change.
68
| Optidrive P2 User Guide |
Version 3.04
www.invertekdrives.com
9
Serial Communications







































































