





























Version 3.07
| Optidrive P2 User Guide |
39
www.invertekdrives.com
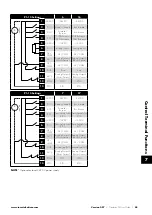
Par.
Description
Minimum
Maximum
Default
Units
P1-10
Motor Rated Speed
0
30000
0
RPM
This parameter can optionally be set to the rated (nameplate) rpm of the motor. When set to the default value of zero, all speed
related parameters are displayed in Hz, and the slip compensation for the motor is disabled. Entering the value from the motor
nameplate enables the slip compensation function, and the Optidrive display will now show motor speed in estimated rpm. All
speed related parameters, such as Minimum and Maximum Speed, Preset Speeds etc. will also be displayed in Rpm.
NOTE
When the drive is operated with the optional Encoder Feedback Interface, this parameter must be set to the correct
nameplate Rpm of the connected motor.
P1-11
Boost Voltage
0.0
Drive Rating Dependent
%
Voltage boost is used to increase the applied motor voltage at low output frequencies, in order to improve low speed and starting
torque. Excessive voltage boost levels may result in increased motor current and temperature, and force ventilation of the motor may
be required.
An automatic setting (
) is also possible, whereby the Optidrive will automatically adjust this parameter based on the motor
parameters measured during an autotune.
P1-12
Primary Command Source
0
6
0
-
0
Terminal Control
The drive responds directly to signals applied to the control terminals.
1
Keypad control -
uni-directional
The drive can be controlled in the forward direction only using an external or remote
Keypad.
2
Keypad control -
bi-directional
The drive can be controlled in the forward and reverse directions using an external or
remote Keypad. Pressing the keypad START button toggles between forward and reverse.
3
PID Control
The output frequency is controlled by the internal PID controller.
4
Fieldbus Mode
Control via Modbus RTU if no fieldbus interface option is present, otherwise control is from
the fieldbus option module interface.
5
Slave Mode
The drive acts as a Slave to a connected Optidrive operating in Master Mode.
6
CANopen Mode
Control via CAN bus connected to the RJ45 serial interface connector.
P1-13
Digital Input Function
0
21
1
-
Defines the function of the digital inputs depending on the control mode setting in P1-12. See section
for
more information.
P1-14
Extended Menu Access
0
30000
0
-
Parameter Access Control. The following settings are applicable:
P1-14 = P2-40 = 101 : Allows access to Extended Parameter Groups 0 – 5
P1-14 = P6-30 = 201 = Allows access to all parameter groups (Intended for experienced users only, usage is not described in this
User Guide).
6
Parameters







































































