Basic theory
BASIC THEORY
This chapter explains some of the basic theory related to settings,
error sources and noise conditions.
Settings
A sonar will transmit a sound wave into the water around the
vessel. When this sound wave hits fish, bottom, or other objects
in the water, a part of the sound will be returned as echoes.
These echoes are collected by the sonar, interpreted by the sonar
computers, and presented on the display.
The most important interpretation is however left to you, and
it may often be difficult to distinguish the echoes and identify
targets. In order to help you with this, the SH90 sonar provides
numerous advanced filter and gain functions. You can also tilt
the sonar beam vertically in order to achieve an optimum result,
and you can use the vertical slice to view “across” into the water.
This chapter provides you with some basic theory about some
of the key settings available.
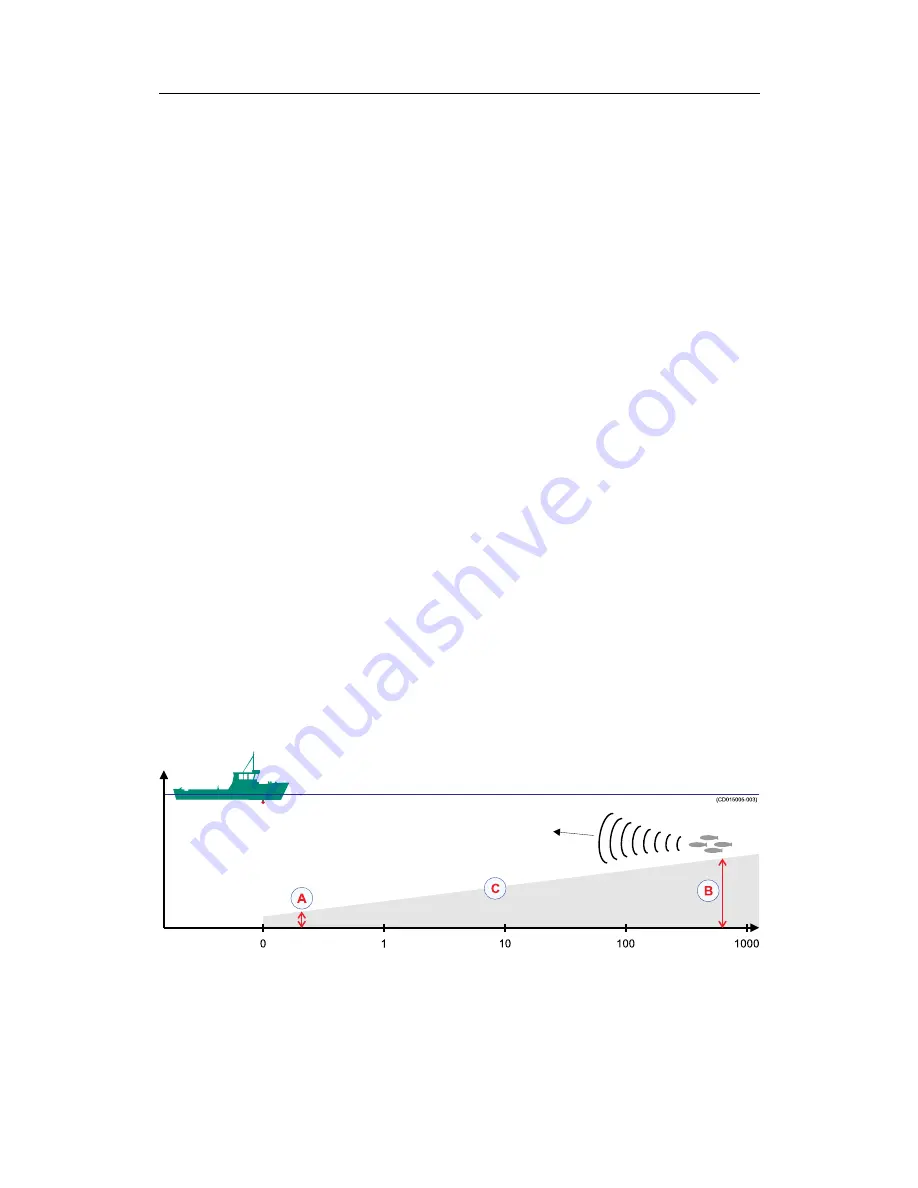
What is TVG?
TVG
means
Time Varied Gain
. As echoes will be weaker
when the distance to them increase, the sonar will automatically
amplify distant echoes more than close echoes. In practice, the
gain will increase in proportion with how long the sonar must
wait for the echoes.
Figure 13
The TVG principle: The gain at time (B) is larger than at time (A)
A
(CD015005-003)
0
1
10
100
1000
B
C
When you choose the TVG setting you can either switch it off, or
choose a
“X log R”
value. The different settings determine how
much gain the sonar will use as time elapses along the X-axis. A
higher value for “X” will make the angle (C) steeper.
323773/C
67
Содержание SH90 - REV A
Страница 2: ......
Страница 8: ...Simrad SH90 6 323773 C ...
Страница 53: ...Operational procedures 16 When activation succeeds click OK and allow the computer to restart 323773 C 51 ...
Страница 83: ...Index 323773 C 81 ...
Страница 85: ......