





























Saia-Burgess
Controls Ltd.
Hardware Manual for the PCD3 Series│Document 26/789; Version E 5│31.01.2005
Hardware
PCD3.H31x
5-87
5
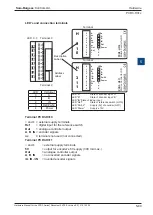
5.6.5 PCD3.H31x, Motion control modules for servo drives
Application
The PCD3.H31x modules are used to position a single axis with variable speed
control DC or AC servomotors. This requires the drive unit to have a power stage and
incremental shaft encoder for capturing position or speed.
The motion control modules contain a single-chip processor that independently
directs and PID controls every movement according to parameters supplied by the
user program (velocity, acceleration and destination position). This enables each axis
to be controlled independently. It is possible to program the linkage of several axes
(point-to-point) in coordinated, quasi-synchronous mode. Linear motion is thereby
achieved with cartesian axes. This is an adjustable motor, capable of determining the
number of rotations and the position via a power stage and an incremental rotation
speed detector.
These I/O modules cannot currently be used with the PCD3.RIO.
Technical data
Number of axis
1
Motion parameters
31-bit registers are used for destination position, velocity and acceleration,
numerical range ± 2
30
Position
Resolution selectable (depending on mechanical factor)
Velocity
Resolution selectable (depending on mechanical factor)
Acceleration
Resolution selectable (depending on mechanical factor)
PID controller
Sample time 341 μs, programmable proportional, inte-
gral and differential factors. Sample time for differential
part can be programmed separately
Analogue controller output
Velocity set point ± 10 V (resolution 12 bit)
Counting frequency
up to 100 kHz
Digital inputs of PCD3.H310
Number of inputs
1 encoder A, B, IN, 1 reference input
Input voltage (typical)
“Low” range
“High” range
24 V
0...+4 V
+15...+30 V
Source operation only (positive logic)
Input current at 24 VDC (typical)
6 mA
Circuit type
electrically connected
Reaction time
30 µs
Encoder frequency
max. 100 kHz
Digital inputs of PCD3.H311
Number of inputs
1 encoder A, /A, B, /B, IN, /IN (no reference input)
Input voltage (typical)
5 V
Signal level
antivalent-inputs according to RS 422
Hysteresis
max. 200 mV
Line termination resistance
150 Ω
Encoder frequency
max. 100 kHz
Analogue outputs for PCD3.H310 and PCD3.H311
Analogue controller output
resolution 12 bit (with sign bit)
Short circuit protection
yes
Electrical isolation
no
Output voltage *)
± 10 V, accuracy of adjustment ± 5 mV
Minimum load impedance
3 kΩ







































































