





























FT 300 Force Torque Sensor - Instruction Manual
30
Info
Prior to use over Universal Robots, adjust the payload and the center of gravity from the Installation tab (refer to the
Moment of Inertia and Center of Mass section).
3.8.1. URCap Package
Info
The robot's PolyScope version must be 3.3 and higher in order to install the URCap.
Installation
Follow this procedure to install the Force Torque Sensor URCap Package
l
Make sure that your PolyScope version is up-to-date and that your
Universal Robots controller is compatible with the Force Torque
Sensor URCap package. Refer to the Control with Universal Robots
section for the UR controller compatibility.
l
Go to
support.robotiq.com
and click on the
product page of the
FT 300 Sensor
.
l
Download the Robotiq_Force_Torque_Sensor-X.X.X.urcap file on a
blank USB stick.
l
Insert the USB stick in the UR teach pendant or controller.
l
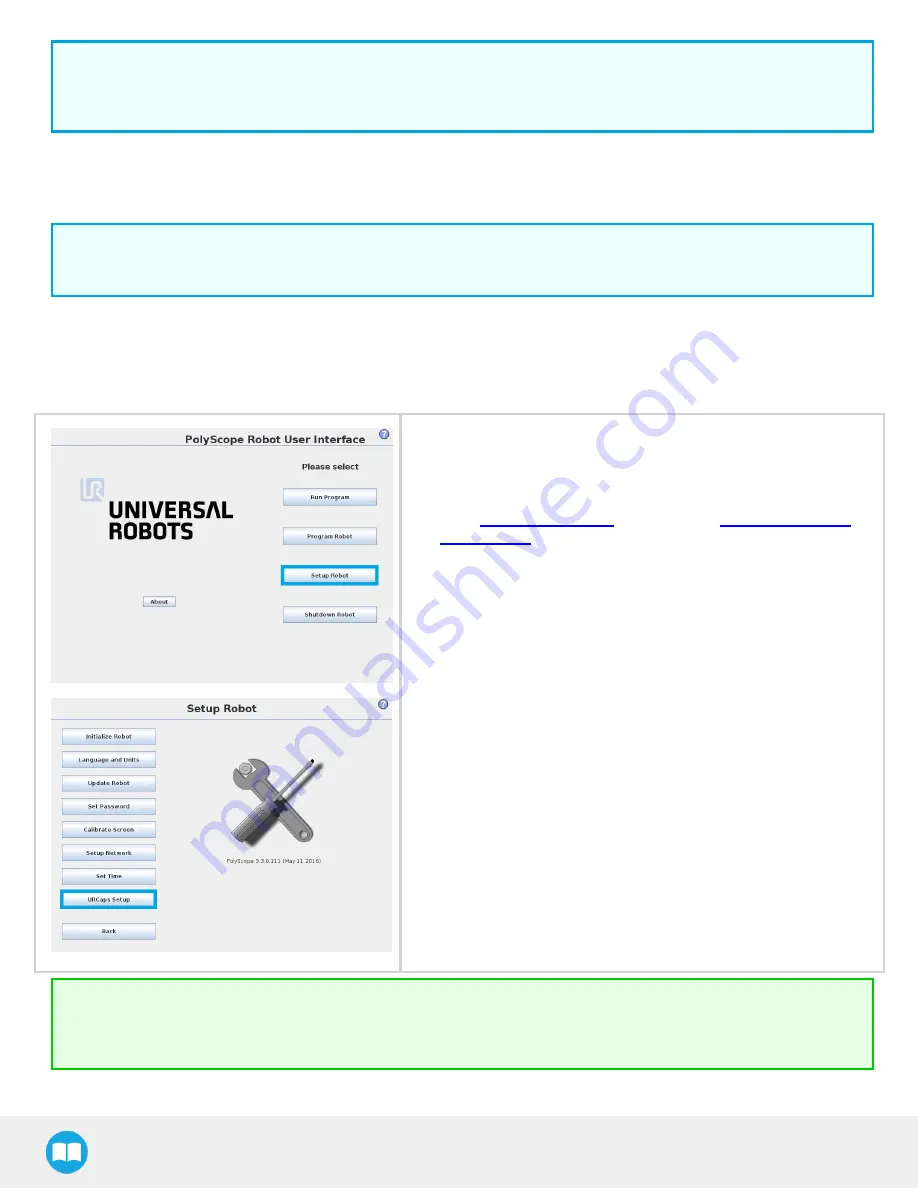
Go to Setup Robot.
l
Tap URCaps Setup.
Tip
Go to the PolyScope home page and tap the About button. A window containing the Universal Robots software version
will pop up.