





























OPERATION
NautoPilot 5000 Series
72
4002.DOC010102
Edition: September 2014
lot is displayed. This mode is still active.
The unique number of the position sensor depends on the selection of the external navi-
gation data evaluation and distribution system.
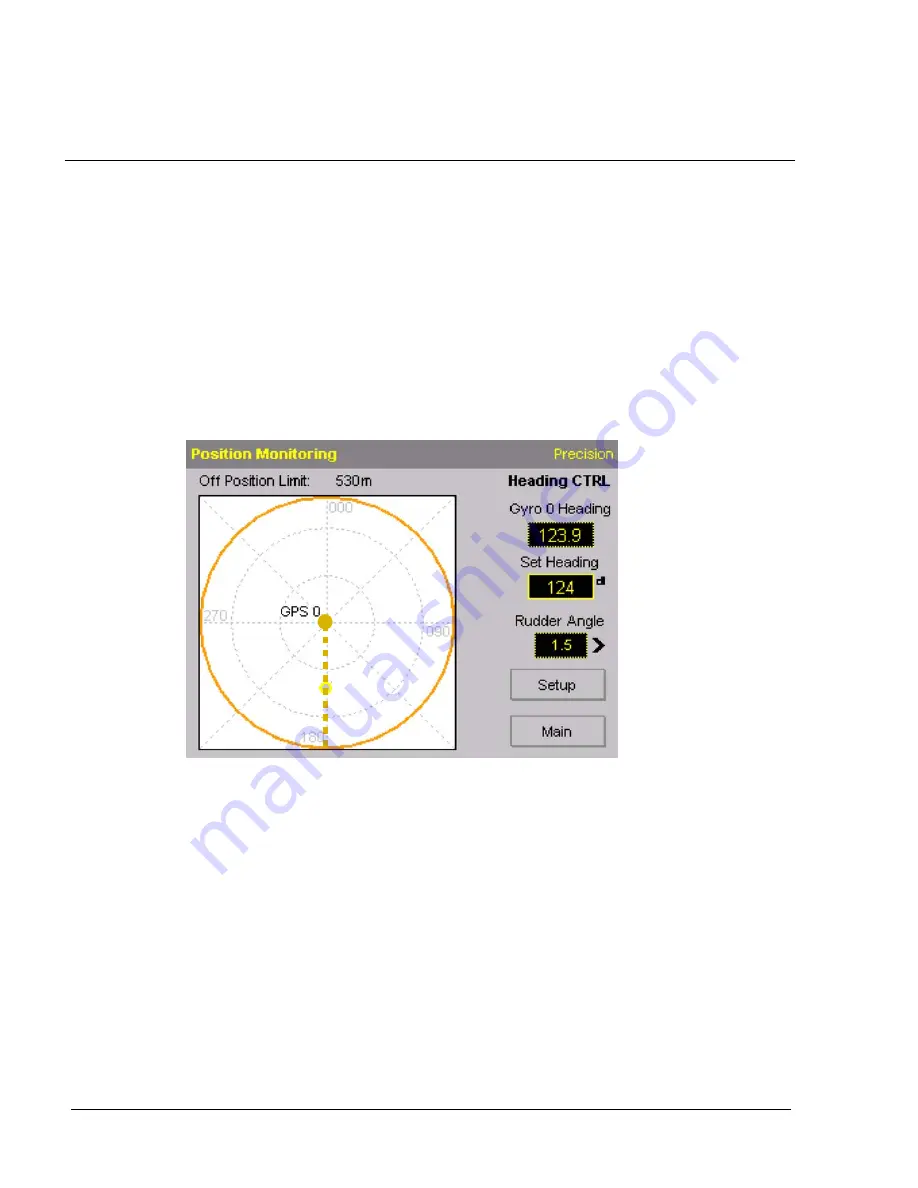
The position sensor in use (Autopilot control function) is displayed in the centre.
As shown in Figure 35 there is a comparison between GPS0 and a dead reckoned posi-
tion. The limit of 530m is not exceeded but there is a difference of approx. 300m to the
south.
Figure 36: Display for the ”Position Monitoring” function (limit exceeded)
DEAD RECKO
As shown in Figure 36 there is a comparison between GPS0 and a dead reckoned posi-
tion:
-- The limit of 530m has been exceeded before (dotted line: drift line).
-- An alert was activated and acknowledged.
-- The dead reckoning position jumps back onto the GPS0 position and
adopts the GPS0 value again.
-- The limit will be exceeded again.







































































