





























OPERATION
NautoPilot 5000 Series
4
4002.DOC010102
Edition: September 2014
Table 1
Overview NautoPilot types (variants)
Heading
Control
Course
Control
Weather
Adaptivity
Track
Control
Category B*
Track
Control
Category C*
Cross
Acceleration
Monitor
High
Precision
Controller
NP 5100
p
p
NP 5300
p
p
p
p
NP 5400
p
p
p
p
p
NP 5500
p
p
p
p
p
p
Please note:
This manual contains information for all types and modes.
Some sections are marked for their validity.
Note:
* For Track Control Category B and C:
In February 2014 the test standard for track control systems IEC 62065 has been re-
vised to edition 2. Please not that only NautoPilot 5400 and 5500 have been adapted to
the latest test standard (introduced with software version E03). NautoPilot 5100 and
5300 are compliant to IEC 62065 edition 1 with software versions E01 and E02.
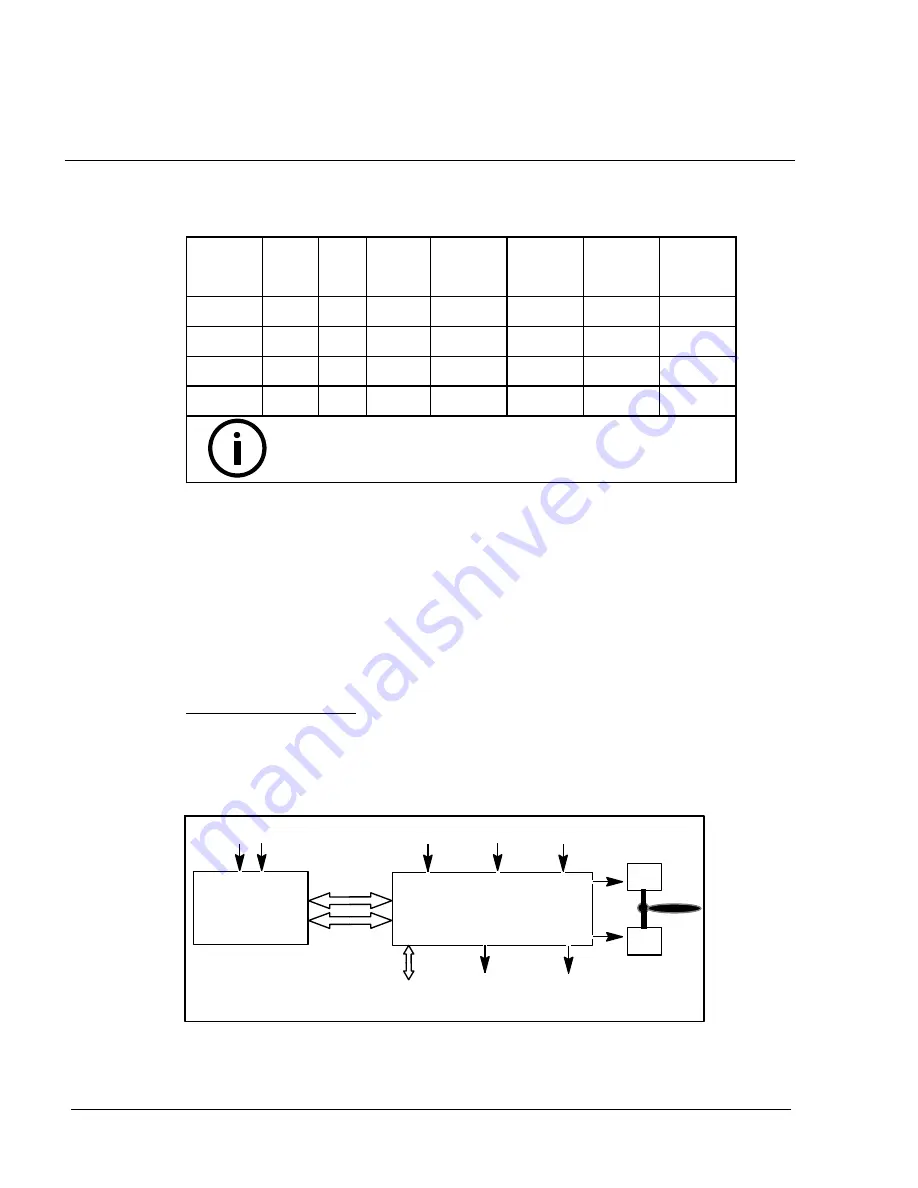
Standalone application
(always with a connected Autopilot Interface, type102--891)
This application may only perform rudder control with an additional Raytheon
Anschütz Autopilot Interface, type 102--891.
Figure 2: Standalone application for the NautoPilot 5000 Series
NautoPilot
5000 Series
DUAL CAN bus
Raytheon Autopilot
Interface, type 102--891
ECDIS
NautoConning
Status
data
Navigation data
(serial)
Rudder
Valve
Valve
Analogue
Feedback
Single
CAN bus
(feedback)
Status data
Alarm data
Rudder control
voltage
(analogue)







































































