





























OPERATION
AUTOPILOT
NautoPilot 5000 Series
97
4002.DOC010102
Edition: September 2014
3
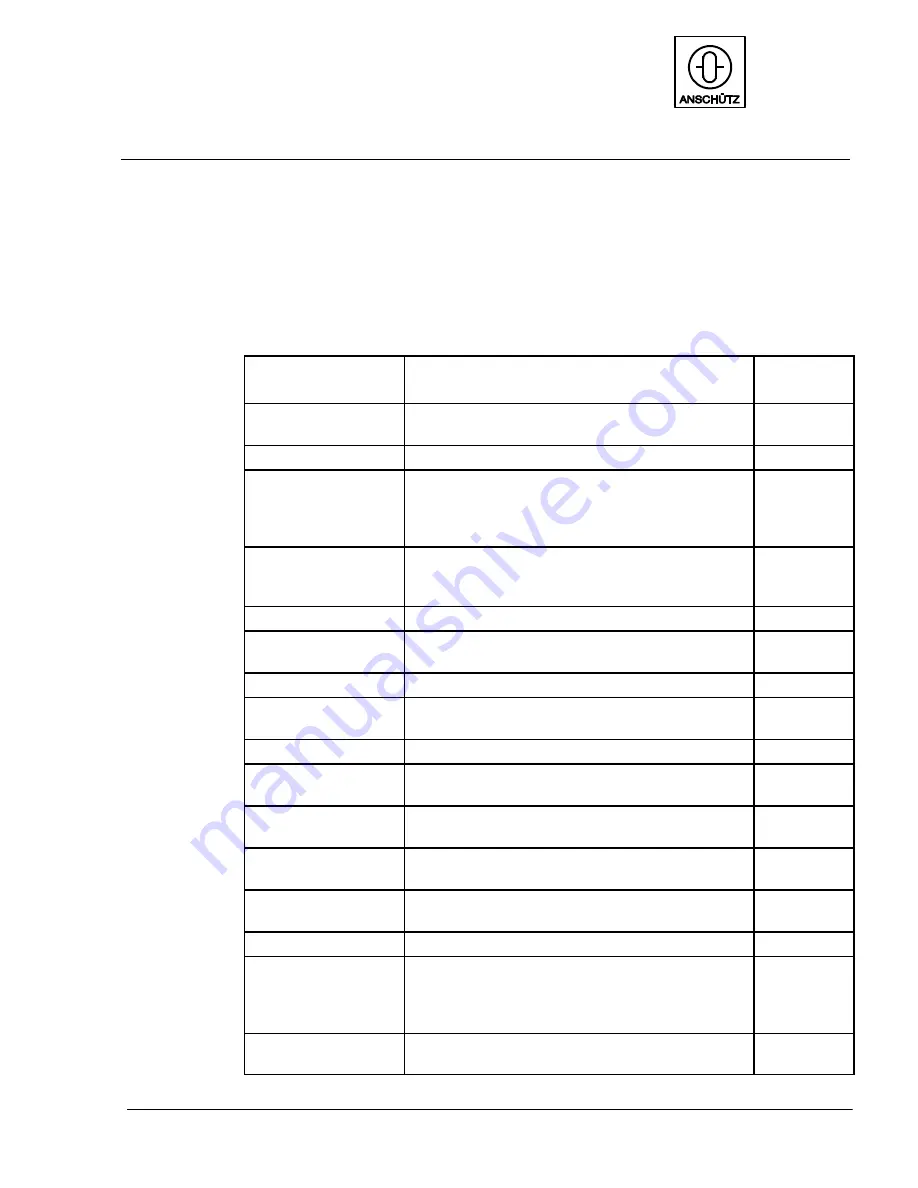
Summary of possible adjustments, parameter settings and configurations
The table below is a summary of all adjustable settings arranged in alphabetical order,
together with a reference to the section in the Operator Manual in which the setting is
explained.
Table 17
Summary of possible adjustments, parameter settings and configurations
Parameter
Meaning
see section
Acceleration Limit
Influence of RoT and speed. Threshold for accel-
eration monitor.
2.3.5.4.1
Acceleration Monitor Influence of RoT and speed.
2.3.5.4
Counter Rudder
Controller Parameter that influences controller
performance.
1.3.3,
2.3.5.1,
2.3.5.2,
2.3.6.5
Course Trim
Alert activation caused by the difference be-
tween set course or track course and actual
heading.
2.3.6.4,
Figure 52
Drift [kn]
Drift for Dead Reckoning.
2.3.5.5
Eco/Prec
Softkey, selection between Economy mode and
Precision mode
2.3
Heading
Heading source.
2.3.6.1
Heading Monitor
Alert activation caused by the difference be-
tween gyro compass and magnet compass
2.3.6.4
man. Speed
Manual speed input.
2.3.6.2
Off Heading
Alert activation caused by the difference be-
tween set and actual heading.
2.3.6.4
Off Position Limit
Alert activation if Off Position Limit for GPS mon-
itoring exceeds the adjusted limit.
2.3.6.4
Para / Mem
Calling up and adjusting of parameter sets
(for non--adaptive mode only)
2.3.8
Rad/RoT
Softkey for selecting heading change under RoT
control or radius control
2.3
RoT
RoT for acceleration limit
2.3.5.4
Rudder
Controller Parameter that influences controller
performance.
1.3.2,
2.3.5.1,
2.3.5.2,
2.3.6.5
Rudder Limit
Rudder limit for the controller function
(no physical limits).
2.3.6.4







































































