



















The proportional band (Pb) is a temperature band
expressed in degrees. When the controller is within this
band, the time proprtioning functions are active.
Integral action (automatic reset) corrects for offset (load
error) for load variations. Reset wind-up inhibition prevents
integral action from occurring outside of the proportional
band. Software antisaturation minimizes process oscilla-
tions when the load changes.
Derivative action is adjusted to match the response time of
the process and to compensate the integral action.
Correct adjustment provides power output compensation
for process load variations. It also minimizes overshoot
and oscillations at start up or in large process upsets.
Refer to Figure 5.1 for additional adjustment instructions.
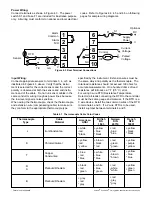
Manual Tuning Procedures:
For some systems it is difficult to execute automatic tuning
or the automatic tuning results are not satisfactory. The
following steps can then be used for initial tuning of a
three-mode control:
Step 1: Adjust the integral and derivative values to 0. This
inhibits the rate and reset action.
Step 2: Set an arbitrary value of proportional band and
monitor the control results.
Step 3: If the original setting introduces a large process
oscillation then gradually increase the proportional
band until the oscillation disappears.
Step 4: If the original setting does not introduce process
oscillations then gradually decrease the propor-
tional band until steady cycling is observed.
Record this important proportional band percent-
age (Pc).
Step 5: Time the period of steady cycling. Record this crit-
ical period Tc. The PID parameters are deter-
mined as:
This method was developed by Ziegler and Nichols.
If you are unfamiliar with tuning PID Controllers, we sug-
gest that you obtain and become familiar with the following
reference material: Tuning of Indusrial Control Systems
by A.R. Corripio ISBN: 1-55617-253-2-Q. Available from:
ISA Publications and Training Aids, phone: 919-549-8411.
This method should be performed with a temperature
chart recorder.
Fig. 5.2 Steady State Cycling
TIME
PV (Process value)
PV
Tc
P Band (Pb) = 1.7 Pc
Integral Time (ti) = Tc
Derivative Time (td) = 0.125 Tc
PV
UPPER PB
SET POINT
LOWER PB
PI
PID
PD
P
OFFSET
PROPORTIONAL BAND
TIME
Perfect
Proportional Band Too Low
Proportional Band Too High
SP
PV
TIME
PROPORTIONAL ACTION
Derivative Too High
Perfect
Derivative Too Low
TIME
SP
PV
DERIVATIVE ACTION
INTEGRAL ACTION
PV
SP
Integral Too High (Too long for recovery)
Perfect
Integral Too Low
TIME
FIG 5.1 Effects of PID Adjustment on Process Response
Fig. 5.3 Response of a Typical Control System Using Various Modes of Control







































































