



























14. COMMUNICATION FUNCTION
14 - 24
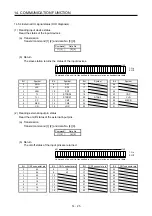
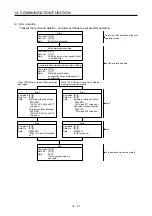
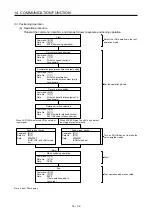
(6) Writing setting values
POINT
If setting values need to be changed with a high frequency (i.e. one time or more
per one hour), write the setting values to the RAM, not the EEP-ROM. The
EEPROM has a limitation in the number of write times and exceeding this
limitation causes the servo amplifier to malfunction. Note that the number of
write times to the EEP-ROM is limited to approximately 100, 000.
Write the parameter setting into EEP-ROM of the servo amplifier. Specify a parameter group in advance.
(Refer to (1) of this section.)
Write any value within the setting enabled range. For the setting enabled range, refer to chapter 5 or
read the setting range by performing operation in (4) of this section.
Transmit command [9] [4], the data No. , and the set data.
The data No. is expressed in hexadecimal. The decimal equivalent of the data No. value corresponds to
the parameter No.
When the data to be written is handled as decimal, the decimal point position must be specified. If it is
not specified, the data cannot be written. When the data is handled as hexadecimal, specify "0" as the
decimal point position.
Check the writing data is within the upper/lower limit value before writing. To prevent an error, read the
parameter data to be written, confirm the decimal point position, and create transmission data.
On completion of writing, read the same parameter data to verify that data has been written correctly.
Command
Data No.
Data
[9] [4]
[0] [1] to [F] [F] See below.
Writing mode
0: Writing to EEP-ROM
3: Writing to RAM
When the parameter data is changed
frequently through communication,
set "3" to the mode to change only the
RAM data in the servo amplifier.
When changing data frequently (once
or more within one hour), do not write
it to the EEP-ROM.
Decimal point position
0: No decimal point
1: First least significant digit
2: Second least significant digit
3: Third least significant digit
4: Forth least significant digit
5: Fifth least significant digit
Data is transferred in hexadecimal.
0 0
Содержание MR-J4-100A
Страница 9: ...A 8 MEMO ...
Страница 61: ...1 FUNCTIONS AND CONFIGURATION 1 44 MEMO ...
Страница 67: ...2 INSTALLATION 2 6 MEMO ...
Страница 137: ...3 SIGNALS AND WIRING 3 70 MEMO ...
Страница 261: ...6 NORMAL GAIN ADJUSTMENT 6 24 MEMO ...
Страница 291: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 30 MEMO ...
Страница 299: ...8 TROUBLESHOOTING 8 8 MEMO ...
Страница 319: ...9 OUTLINE DRAWINGS 9 20 MEMO ...
Страница 461: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 36 MEMO ...
Страница 511: ...14 COMMUNICATION FUNCTION 14 38 MEMO ...
Страница 559: ...16 USING A DIRECT DRIVE MOTOR 16 20 MEMO ...
Страница 583: ...17 FULLY CLOSED LOOP SYSTEM 17 24 MEMO ...
Страница 621: ...APPENDIX App 38 ...
Страница 639: ......





















































