





















6. SERVO MOTOR DRIVING
6 - 39
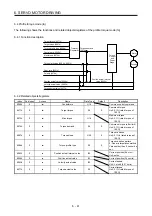
6.3.3 Directions for use
(1) pv mode operation sequence
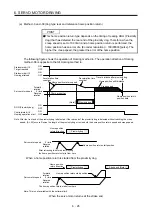
(a) When Servo-lock selection at speed control stop is enabled ([Pr. PC23] = "_ _ _ 0")
When New set-point (bit 15 of Controlword) is set to "1" after Target Velocity (60FFh) has been set,
the servo motor is driven. When Target Velocity is set to "0", the servo motor decelerates to a stop.
When New set-point is set to "0" while the servo motor is stopped, the servo motor goes into the
servo-lock status.
When New set-point is set to "0" while the servo motor is being driven, the servo motor decelerates
to a stop and goes into the servo-lock status. When Target Velocity is set after New set-point has
been set to "1" in this condition, the servo motor is driven.
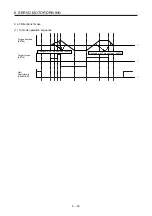
Velocity Actual Value
(606Ch)
Target Velocity
(60FFh)
Speed Statusword
(6041h) bit 12
Target reached
Statusword
(6041h) bit 10
Velocity window time (606Eh)
Velocity threshold time (6070h)
Accelerates with Profile acceleration (6083h)
Decelerates with Profile deceleration (6084h)
New set-point
(6040h) bit 15
Содержание MELSERVO-JE
Страница 15: ...1 FUNCTIONS AND CONFIGURATION 1 4 MEMO ...
Страница 21: ...2 SIGNALS AND WIRING 2 6 MEMO ...
Страница 57: ...4 PARAMETERS 4 34 MEMO ...
Страница 109: ...6 SERVO MOTOR DRIVING 6 44 MEMO ...
Страница 111: ...7 APPLICATION OF FUNCTIONS 7 2 MEMO ...
Страница 113: ...MEMO ...







































































