





















6. SERVO MOTOR DRIVING
6 - 34
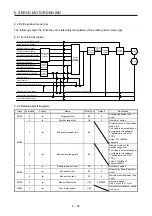
Index Sub Index
Access
Name
Data Type
Default
Description
60A8h
0
rw
SI unit position
U32
SI unit position
The value is automatically set
according to the setting of
"Position data unit" of [Pr.
PT01].
60A9h
0
rw
SI unit velocity
U32
FEB44700h
SI unit velocity
FEB44700h (0.01 r/min)
Note 1. This is not compatible with the MR-JE-_C servo amplifier.
2. Refer to "MR-JE-_C Servo Amplifier Instruction Manual (Network)".
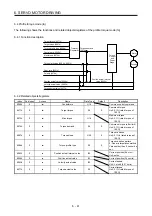
(1) Details on the Controlword (6040h) (pp mode)
Bit
Symbol
Description
4
New set-point
New positioning parameters are obtained when this bit turns on.
5
Change set
immediately
0: Set of set-points
1: Single set-point
6
abs/rel
0: Absolute position command
1: Relative position command
When the unit is set to degree, relative position commands are disabled. When the relative
position command is specified and positioning is started, [AL. F4.8] occurs and positioning cannot
be started.
8
HALT
0: Positioning is executed.
1: The servo motor stops according to Halt option code (605Dh).
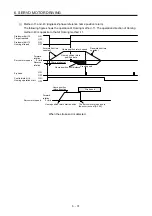
9
Change on set-point
Enabled only for Set of set-points (Bit 5 = 0).
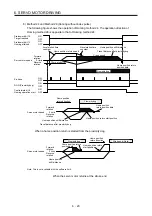
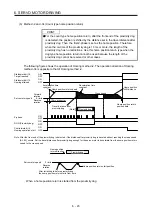
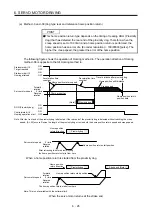
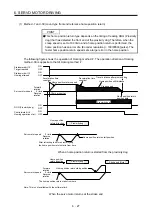
0: The next positioning starts after the current positioning is completed (stopped). (Black line
(Refer to section 6.2.3 (2).))
1: The next positioning starts after positioning is executed with Profile velocity (6081h) held up to
the current set-point. (Gray line (Refer to section 6.2.3 (2).))
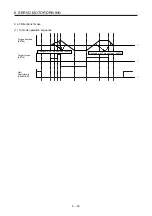
(2) Details on the Statusword (6041h) (pp mode)
Bit
Symbol
Description
10
Target reached
0 (Halt (Bit 8) = 0): Target position not reached.
0 (Halt (Bit 8) = 1): Axis decelerates
1 (Halt (Bit 8) = 0): Target position reached.
1 (Halt (Bit 8) = 1): Velocity of axis is 0
Judgment condition for Target position reached
If the error between Position actual value (6064h) and Target position (607Ah) has stayed within
Position window (6067h) for Position window time (6068h) or more, Target position reached is
stored.
12
Set-point
acknowledge
0: Positioning completed (wait for next command)
1: Positioning being executed (The set-point can be overwritten.)
13
Following error
0: No following error
1: Following error
Содержание MELSERVO-JE
Страница 15: ...1 FUNCTIONS AND CONFIGURATION 1 4 MEMO ...
Страница 21: ...2 SIGNALS AND WIRING 2 6 MEMO ...
Страница 57: ...4 PARAMETERS 4 34 MEMO ...
Страница 109: ...6 SERVO MOTOR DRIVING 6 44 MEMO ...
Страница 111: ...7 APPLICATION OF FUNCTIONS 7 2 MEMO ...
Страница 113: ...MEMO ...







































































