


















10. Interface specifications
MiR500 User guide (en) 09/2019 - v.1.3 ©Copyright 2018-2020: Mobile Industrial Robots A/S.
147
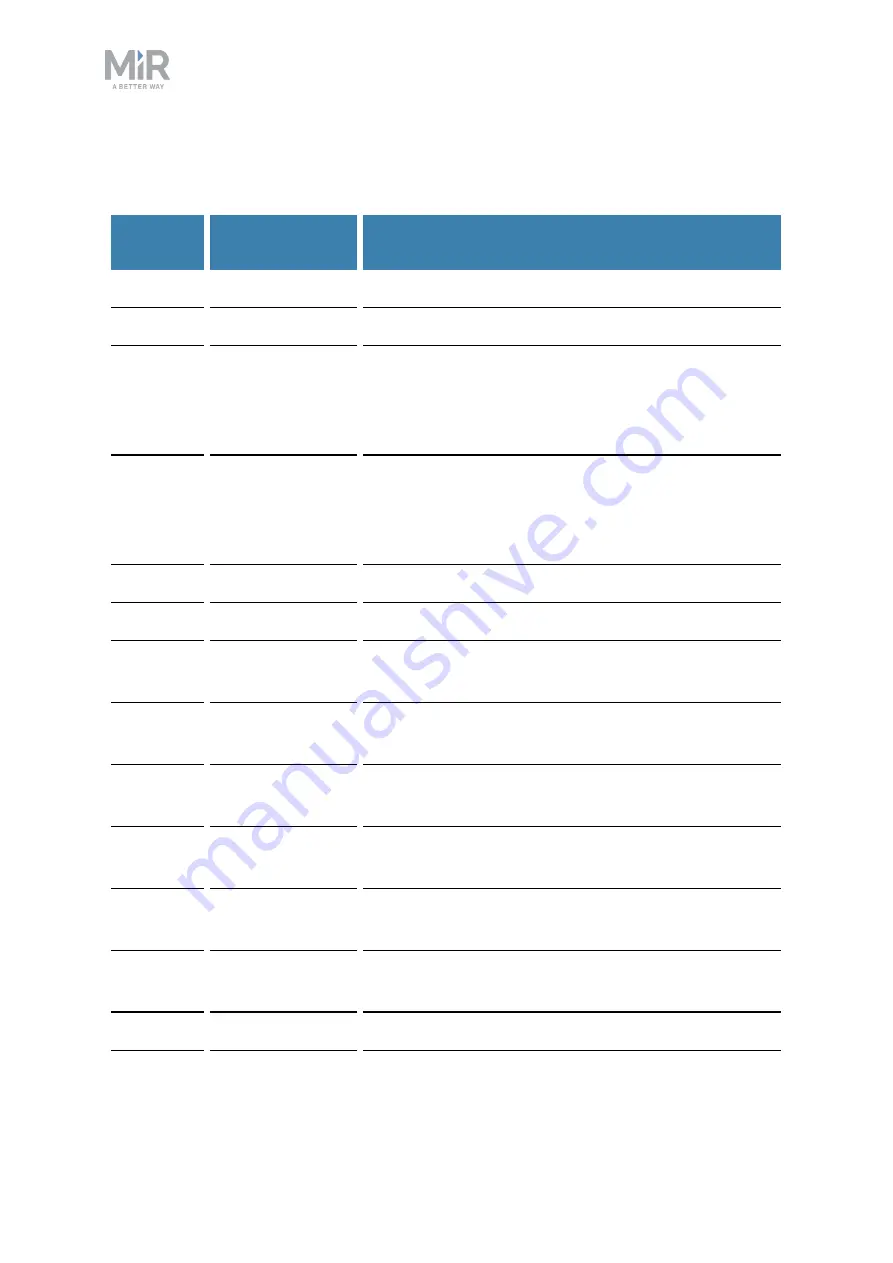
The following table contains the description of the pins of the Auxiliary safety functions
interface.
Pin num-
ber
Signal name
Description
1
Test output
24V out.
2
Test output
24V out.
3
Safeguarded stop
1
Safeguard dual channel input. Set any or both pin(s)
low to enter Emergency stop. If pins are unequally set
for a period greater than 3 seconds, PLC will have to
be reset by setting both pins LOW, then high.
4
Safeguarded stop
2
Safeguard dual channel input. Set any or both pin(s)
low to enter Emergency stop. If pins are unequally set
for a period greater than 3 seconds, PLC will have to
be reset by setting both pins LOW, then high.
5
Locomotion 1
Output - high when the robot is standing still.
6
Locomotion 2
Output - high when the robot is standing still.
7
Shared E-stop out
1
Shared emergency stop out 1. Output - low when the
robot is in protective stop.
8
Shared E-stop out
2
Shared emergency stop out 2. Output - low when the
robot is in protective stop.
9
Shared E-stop in
1
Shared emergency stop in 1. Input - Low = robot goes
to protective stop.
10
Shared E-stop in
2
Shared emergency stop in 2. Input - Low = robot goes
to protective stop.
11
Reduced speed 1
Input - circuit broken will result in that the robot can
not drive fast.
12
Reduced speed 2
Input - circuit broken will result in that the robot can
not drive fast.
13
Unassigned
Unassigned.







































































