





























3. Safety functions
MiR500 User guide (en) 09/2019 - v.1.3 ©Copyright 2018-2020: Mobile Industrial Robots A/S.
54
Signals from the safety laser scanners are combined with input from the 3D cameras and
proximity sensors and are used to evaluate if an object or person is in the path of the robot.
In that case, the robot gradually slows down while trying to avoid the obstacle. If unable to
make its way around the obstacle, the robot stops and waits for clearance.
Protective fields
The protective fields are part of the robot’s personnel detection means. They consist of
individually configured sets of fields called 'field sets' when combined. The active field sets
are automatically selected based on the speed of MiR500. A person or object within an
active protective field will bring the robot to a protective stop and the robot will remain
stopped until the protective field is free.
The commissioner can change the field sets if, for instance, the surface requires a longer
breaking distance. See
. See the how-to guide
"How to adjust the field sets on
MiR250/500/1000"
on the distributor site.
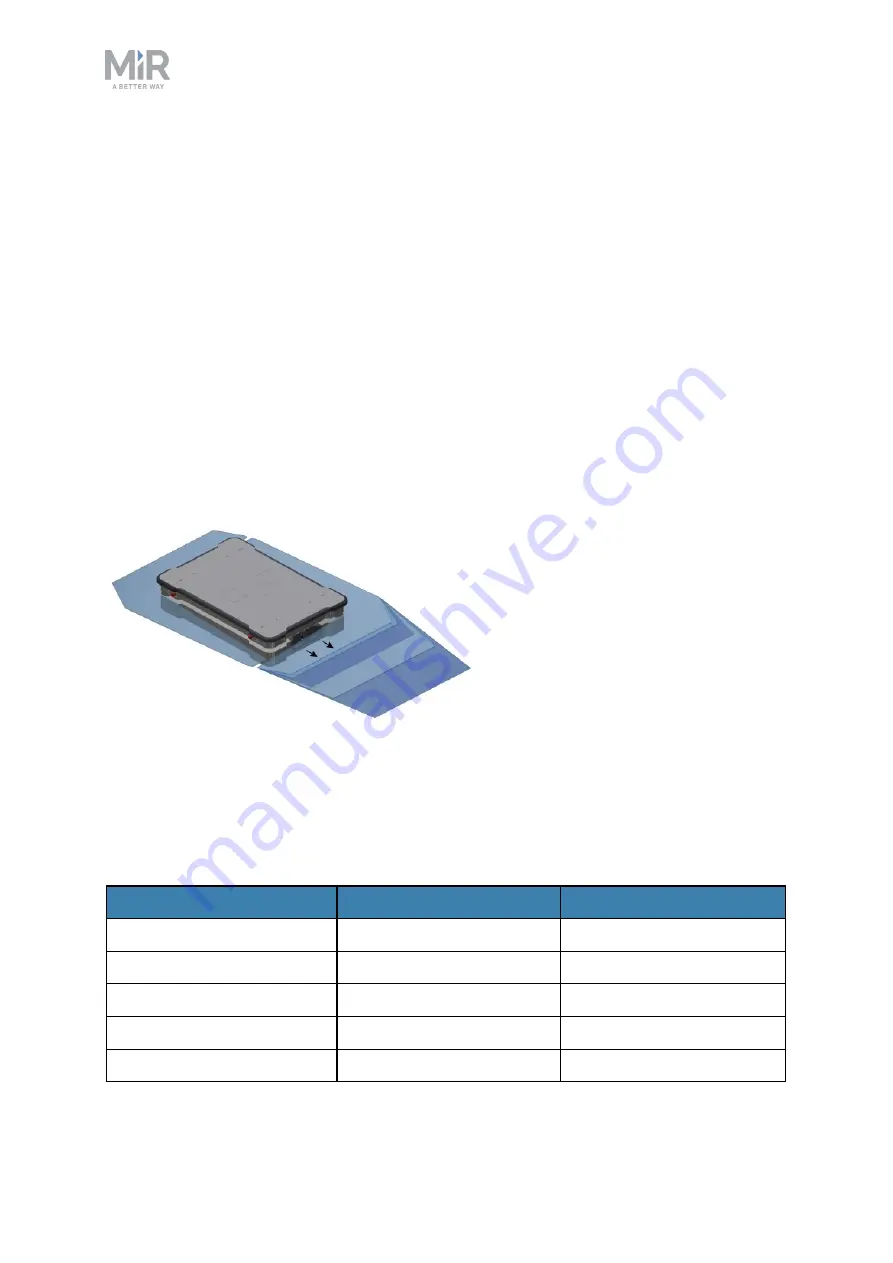
Figure 3.6. Protective fields of the front and rear safety laser scanners.
Protective field settings
The following table shows how the protective fields are configured.
Protective fields in the driving direction:
Protective fields
Speed range
Field size
Protective field 1 (innermost) <0.1 m/s
35 cm
Protective field 2
0.1-0.3 m/s
40 cm
Protective field 3
0.3-0.6 m/s
60 cm
Protective field 4
0.6-0.9 m/s
85 cm
Protective field 5
>0.9 m/s
135 cm







































































