





























PyroTec™ PRO Hardw are User’s Manual, V1.2
42
RT-MN024-1.2 02/21
Pressure-
Based Liquid
Level
Detection
The pLLD function measures the pressure changes in the tip as the tip moves down. As
soon as the tip touches the liquid surface, the pressure change triggers a detection signal.
pLLD records the height of the tip at the time of the trigger signal.
pLLD can be used as an alternative to the capacitive liquid level detection (cLLD), e.g. for
detecting non-conductive liquids, or it can be used in combination with cLLD for conduc-
tive liquids.
Pressure-Mon-
itored Pipet-
ting
The PMP function monitors the pressure changes in the air gap between the sample and
the system liquid during aspiration and dispense. PMP is able to detect errors, such as
clots and air aspiration, by comparing recorded and modeled (real-time simulated) pres-
sure signals.
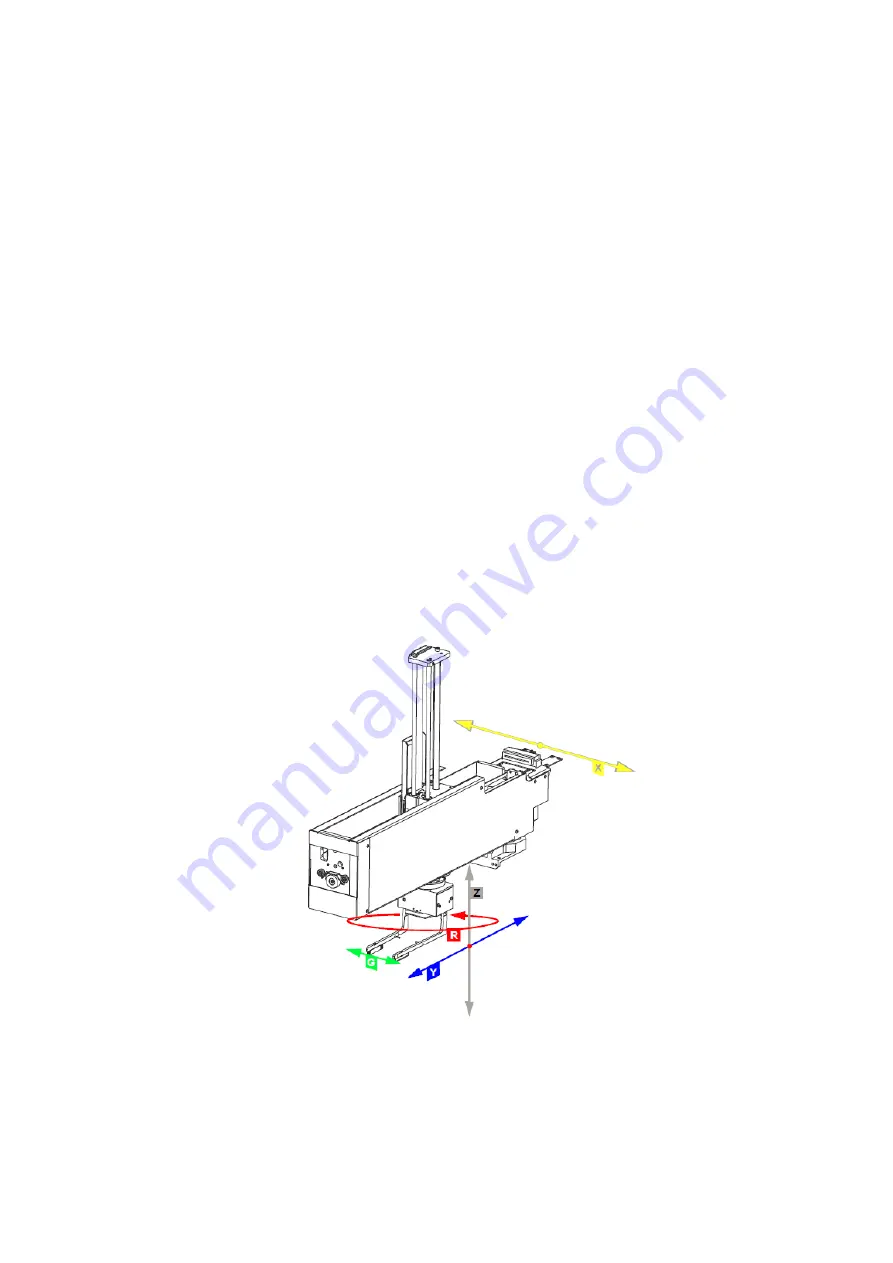
5.3.3 Robotic Manipulator Arm Standard (RoMa Standard)
The robotic manipulator arm is used to transport microplates, reagent blocks, deep well
plates, etc. to different positions on the worktable or for storage in the microplate shelf.
The RoMa standard coordinate system consists of five axes; the X-axis, the Y-axis and the
Z-axis defining linear movements and the R-Axis defining rotational movements. The grip-
pers can move in horizontal direction (G-axis).
Rob otic manipulator arm RoMa
G
Axis for gripper movements
R
Rotational axis
X
Axis from left to right of worktable
Y
Axis from front to back of worktable
Z
Vertical axis above worktable