





















V2.0
7
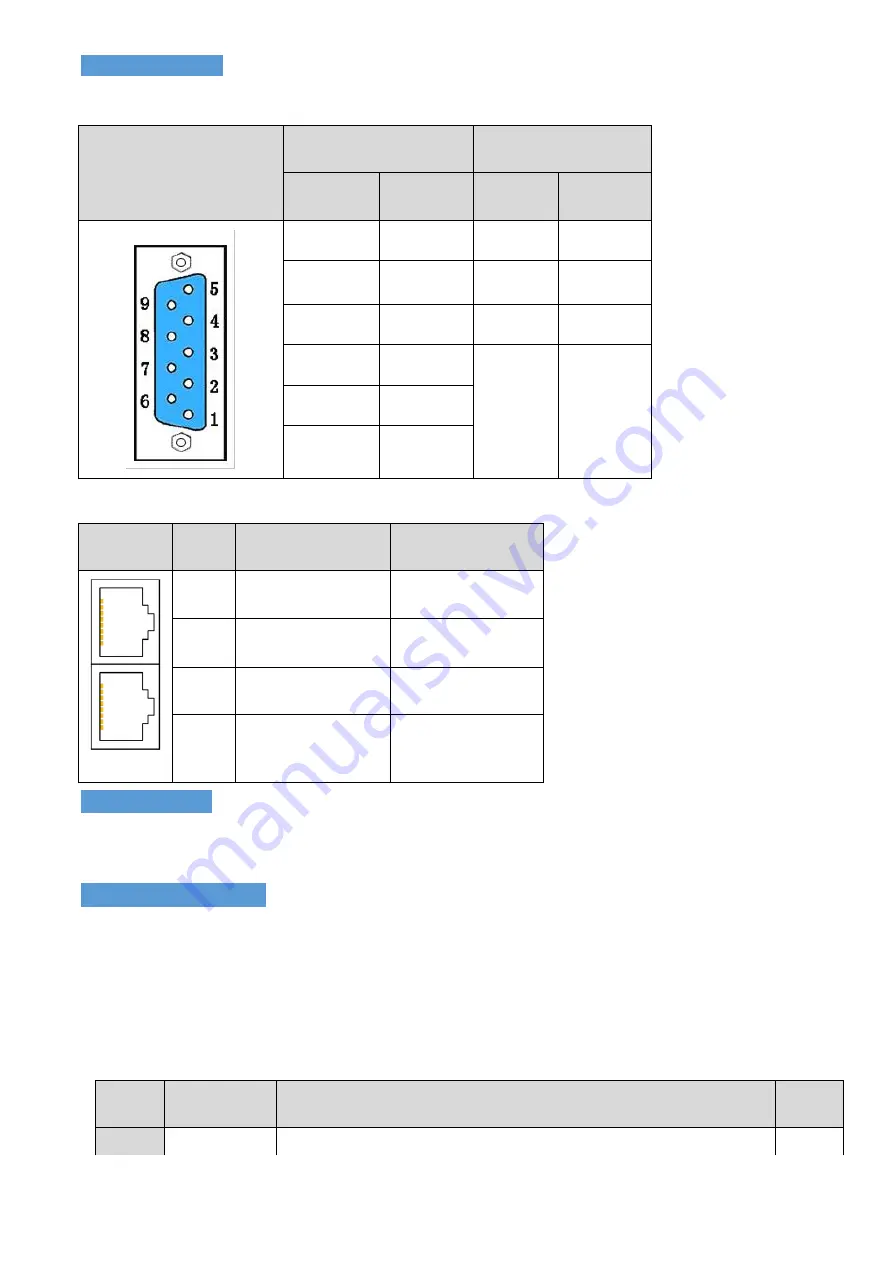
2.3.4
总线通讯接口
表
2-4
驱动器
X4
通讯接口定义
表
2-5
驱动器
X10
通讯接口定义
3 Easy Use
功能
Easy Use
旨在为用户快速设定控制环参数,免去伺服调试的繁琐步骤,调整后的性能可以满足大部分应用
场合;并另外开辟独立区域,方便用户设置常用的重要参数。
3.1 Easy Use
操作步骤
1
、
EASY
流程包含常用参数,请逐一确认,最后通过
EA00
保存重启。
EASY
流程执行完后,请运行机器,如
果性能理想,则不需要执行
tunE
流程。否则,再执行
tunE
流程
2
、
tunE
流程为惯量测定流程,最后通过
tn00
保存。通过
tn03
进行惯量测定后,驱动器将根据整定结果更
改刚性等级(
tn01
)。
3
、
请运行机器,如果性能不理想,再通过
tn01
逐级修改刚性等级,请注意一边调整,一边观察机器性能。
接口
RS485
接口
CANopen
总线接口
针脚号
信号
针脚号
信号
2
RX+
2
CAN_L
3
TX+
3
GND
5
GND
7
CAN_H
6
+5V
7
RX-
8
TX-
接口
针脚号
信号
描述
8
7
6
5
4
3
2
1
8
7
6
5
4
3
2
1
1
TD+
发送信号正端
2
TD-
发送信号负端
3
RD+
接收信号正端
6
RD-
接收信号负端
数码管
编码
名称
描述
默认值
EA01
电机型号
参考表一,更改后需要保存并重启驱动器。
404b





















































