





























85
if
(
results
.
value
==
left
)
/ * Judgment on the received value, if the value is left,
execute the command in the following {}, here is the instruction to the left. * /
{
int
val
=
150
;
analogWrite
(
M1
,
0
);
analogWrite
(
E1
,
val
);
//the speed value of motorA is val
analogWrite
(
E2
,
0
);
analogWrite
(
M2
,
val
);
//the speed value of motorB is val
delay
(
500
);
/ * Rotate 500ms to the left and stop, otherwise the car will always
be spinning around. * /
analogWrite
(
M1
,
0
);
analogWrite
(
E1
,
0
);
//the speed value of motorA is 0
analogWrite
(
M2
,
0
);
analogWrite
(
E2
,
0
);
//the speed value of motorB is 0
analogWrite
(
A1
,
180
);
irrecv
.
resume
();
}
if
(
results
.
value
==
right
)
/ * Judgment on the received value, if the value is
right, execute the command in the following {}, here is the command to the right. * /
{
int
val
=
150
;
analogWrite
(
E1
,
0
);
analogWrite
(
M1
,
val
);
//the speed value of motorA is val
analogWrite
(
M2
,
0
);
analogWrite
(
E2
,
val
);
//the speed value of motorA is val
delay
(
500
);
analogWrite
(
M1
,
0
);
analogWrite
(
E1
,
0
);
//the speed value of motorA is 0
analogWrite
(
M2
,
0
);
analogWrite
(
E2
,
0
);
//the speed value of motorB is 0
analogWrite
(
A2
,
180
);
irrecv
.
resume
();
}
if
(
results
.
value
==
back
)
/ * Judgment on the received value, if the value is back,
execute the command {} below, here for the back instruction. * /
{
int
val
=
150
;
analogWrite
(
E1
,
0
);
Содержание Hummer-Bot
Страница 1: ...Hummer Bot Instruction Manual Github https github com keywish keywish hummer bot...
Страница 7: ...4...
Страница 8: ...5...
Страница 9: ...6...
Страница 10: ...7...
Страница 13: ...10 Fig 2 2 Several commonly usedArduino...
Страница 15: ...12 After the completion as shown...
Страница 16: ...13 The second step is to Welding wire on the motor...
Страница 17: ...14 After the completion as shown...
Страница 19: ...16 Fig 3 1 3 Diagram of Aluminum Alloy Bracket Installation...
Страница 20: ...17 Fig 3 1 4 Diagram of Motor Installation Fig 3 1 5 Fixing Screw for Motor...
Страница 24: ...21 Fig 3 1 10 Diagram of Wheel Installation Fig 3 1 10 Diagram of Wheel Screw Fixation...
Страница 29: ...26 Fig 3 1 15 Diagram of Tracing Module Installation...
Страница 30: ...27 Fig 3 1 16 Diagram of Screw Brackets Fig 3 1 17 The Back of Complete Installation...
Страница 32: ...29 First install the screws on the UNO After the completion as shown...
Страница 33: ...30 Then install UNO on acrylic plates Fig 3 1 20 Diagram of Arduino Mainboard and Battery Box Installation...
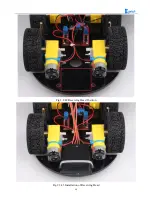
Страница 43: ...40 Fig 3 1 33 Diagram of Wires Arrangement Fig3 1 34 the Effect of Whole Assembly...
Страница 56: ...53 Fig 3 2 11 Diagram of Data with Obstacles Fig 3 2 12 Diagram of Data without Obstacles...
Страница 69: ...66 Fig 3 2 22 Diagram of Steering Gear Fig 3 2 23 Composition of Steering Gear...
Страница 93: ...90 Fig 3 2 42 Receiving Head Position Fig 2 3 43 Installation of Receiving Head...







































































