

























P. 56
Position 2
4-12 Caution Regarding Relative Coordinate Assign
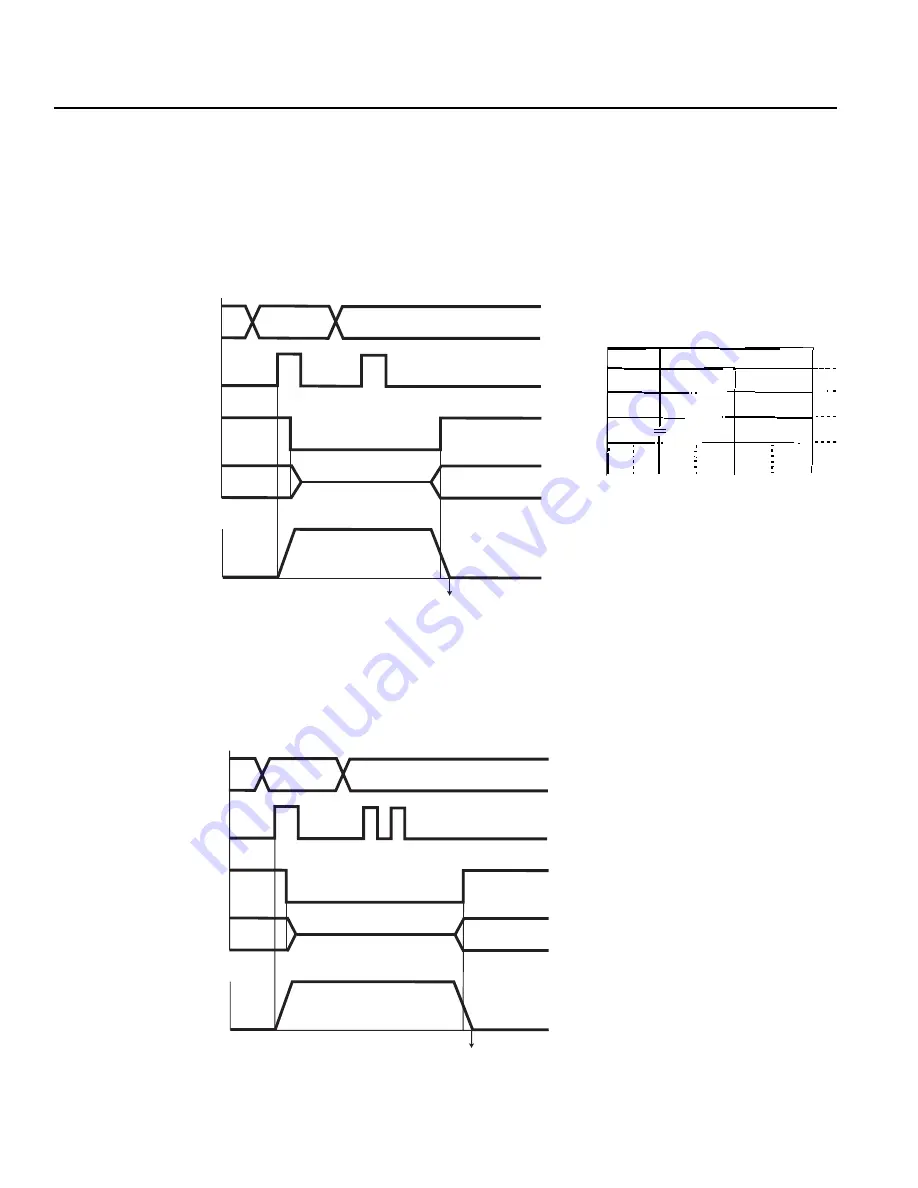
(1) Caution During Positioning Movement
When selecting a relative posisition through the I/O and toggling the Start Input, during actuator motion towards
another point, the distance of the next point selected will be added on to the initial point the actuator was moving
towards. If the next point is in the negative direction relative to the first point, the actuator moves to a position as the
result of the subtraction of the 2 positions.
Example: When the Start Input of Position 2 is executed during movement to Position 1 (Table 4-12-1), moves to the
position 40mm away from home.
4. Application (Practice)
Position
Speed
In addition, when the Start Input is executed numerous times during position movement, the actuator moves to a position
that is five times the distance of the inital position input.
Example: In case Start Input of Position 2 is executed (Table 4-12-1 above) twice during movement towards Position 1,
the actuator moves to a position approximately 50mm away from home (five times Position 2 which is 10mm).
Command Position
Start
Complete Position
Actuator Transfer
Speed
Positioning Complete
Position 1
Position 2
Position 2
Position from home: 50
Distance
Position from home: 40
Command Position
Start
Complete Position
Actuator Transfer
Speed
Positioning Complete
Distance
Position 1
Position 2
No.
0
1
*
*
30
100
2
10
100
Table 4-12-1