





























P. 37
4. Application (Practice)
4-2 Procedure for Initial Homing (Absolute Specifications)
4-2-1 Power-UP Procedure
(1) Connnect the motor • brake cable and encoder cable to the controller (Note 1).
(2) Connect the upper PLC to the P I/O Connector using the attached flat cable.
(3) When connecting more than 1-axis, address each by using the dip switch.
For details, please refer to the “specifications” section under the dip switch settings.
(4) Supply main power (24V) to the controller terminal board.
(5) Supply P I/O Power (24V).
(6) Connect the battery.
(7) Turn the P I/O of Hold Input ON (GND Pin 10 [NPN] - Supply 24V [PNP]).
(8) Reset the alarm (Refer to Section 4-2-2, “Alarm Reset” in this manual).
(9) Normal status is RDY, RUN LED turns ON, and abnormal status is when ALM LED is ON.
(10) Begin homing (Refer to Section 4-2-3, “Homing,” in this manual).
Caution (1):
The actuators for absolute are the only actuators that can operate using RCP Controller Absolute
specifications.
Caution (2):
During the inital power installation, abnormal detection for absolute encoder always outputs. This is
not abnormal.
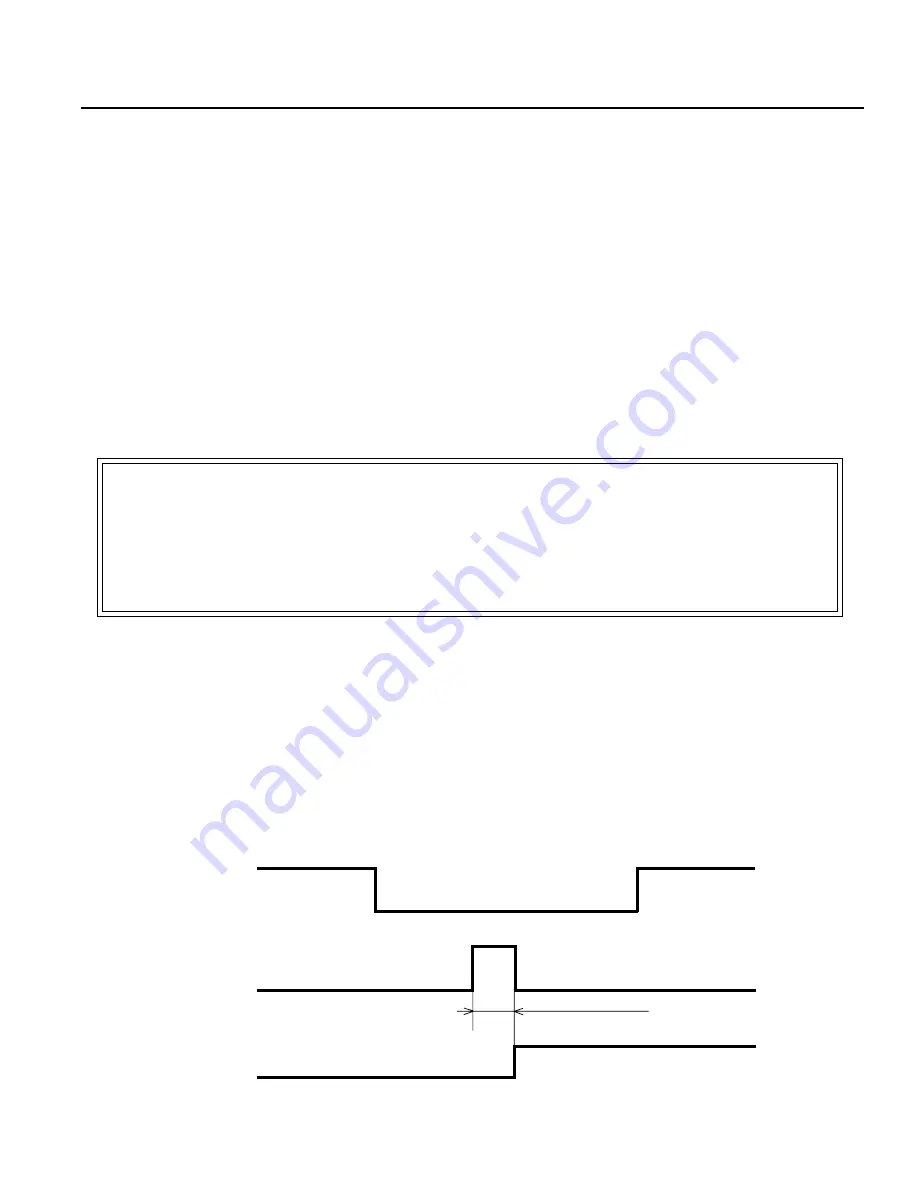
4-2-2 Alarm Reset (Absolute Specifications)
Alarm reset occurs during emergency stop status, after start signal input, and when E-stop is released.
Or, you may reset the alarm using the optional PC software.
Emergency Stop
Start Input
Alarm (PIO)
Over 4m sec