





























P. 28
3-1 Position Data Table
No
• Indicates the position number. In case of inputting the relative
transfer load, type the Minus Key. In case of input operation
using the teaching pendant, “=” will be displayed between the
number and position. In case of Absolute, there is no need for
operation here.
Position
• The distance from home (in mm).
Absolute Coordinate Assign: The distance from home (in mm).
You may not input negative value.
Relative Coordinate Assign: The distance from current location
(in mm). You may also input negative
value.
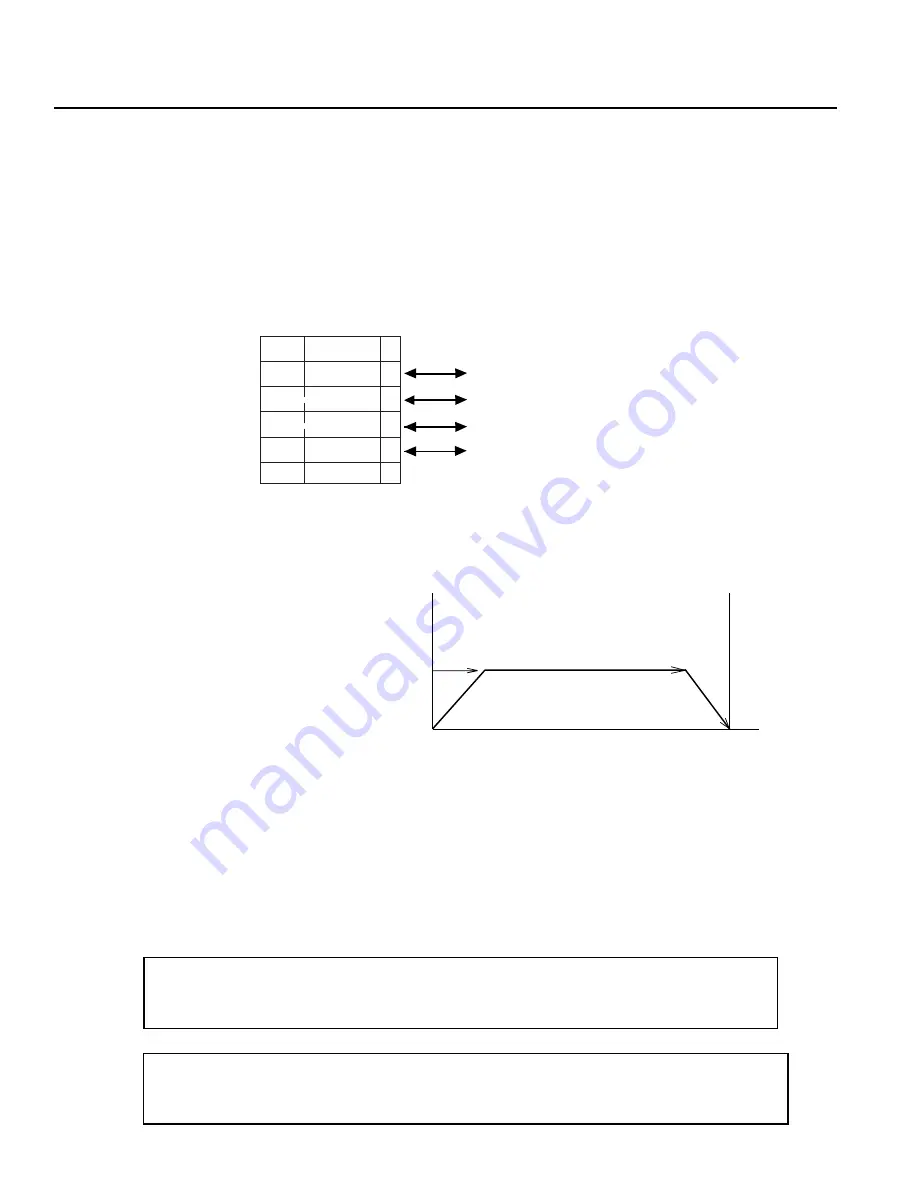
Speed
• The speed at which the actuator moves (mm/sec).
The initial value will differ according to actuator type.
Acc (G)
• Inputs the acceleration/deceleration of when the actuator
Push (%)
• Selects either the Positioning Mode or Push Mode.
The initial value is set as 0.
0:
Positioning Mode (=normal operation)
Other than 0:
Push mode (%)
•
In Push Mode, input the % of max current of the servo
motor at which you would like the push to end.
3. Data Input (Basic)
Caution:
When the push power is too small, push malfunction may occur due to driven resistance,
so please be careful.
Caution:
The relationship of Push Power (kgf) during stop towards work per type and current
limit value is listed in Pages 30~31.
.
o
N
n
o
i
t
i
s
o
P
0
0
3
1
0
1
2
0
1
-
3
0
0
1
=
=
Acceleraton/deceleration speed G
• •• • • MIN 0.01G Late riser
Max 1.00G Fast riser
Start
Speed
Acceleration/deceleration
)
)
Completion
)
)
Time
Relative Coordinate Assign
Plus 10mm from current location
Absolute Coordinate Assign
30mm from home
Relative Coordinate Assign
Minus 10mm from current location
Absolute Coordinate Assign
100mm from home