

























30
C22UE001-2004
2.3
Robot Specifications
The robot specifications are shown in Table 2-2.
Table 2-2 Robot specification
Item
RA605-GC
Maximum Reach Radius(mm)
710
909
Degrees of Freedom
6
Installation [Note 1]
Floor
、
slope
、
wall mounting
、
ceiling mounting
Nominal Load Capacity(kg)
5 [Note 2]
Maximum Load Capacity(kg)
7
Cycle time(sec) [Note 3]
0.5
Position Repeatability(mm)
±0.02
±0.03
Motion Range
J1
±165°
J2
+85°~ -125°
J3
+185°~ -55°
J4
±190°
J5
±115°
J6
±360°
Maximum Speed
J1
360°/ s
250°/ s
J2
288°/ s
200°/ s
J3
420°/ s
300°/ s
J4
444°/ s
444°/ s
J5
450°/ s
450°/ s
J6
720°/ s
720°/ s
Allowable Load
Moment at Wrist
J4
8.40 N-m
J5
8.40 N-m
J6
5.56 N-m
Allowable Load
Inertia at Wrist
J4
0.36 kg-
m
2
J5
0.36 kg-
m
2
J6
0.13 kg-
m
2
Manipulator Weight (kg)
40
45
Integrated signal & power supply
6 Input / 4 Output
Integrated air supply [Note 4]
Two channels of air connection
Protection rating
IP 65
Noise level [Note 5]
Less than 75 dB
Содержание RA605-710-GC
Страница 1: ...www hiwin tw User Manual Articulated Robot RA605 GC Original Instruction...
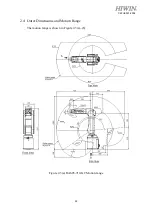
Страница 34: ...33 C22UE001 2004 Figure 2 3 b RA605 909 GC Motion range...
Страница 51: ...50 C22UE001 2004 5 3 Operation Name descriptions of the manual brake release device and their functions...
Страница 68: ...67 C22UE001 2004 8 Appendix Suspension plate refer to section 1 1...






























































