



























15
C22UE001-2004
1.
Transportation and Installation
1.1
Transportation
Sling can be used to transport the robot. The transportation procedure is as follows:
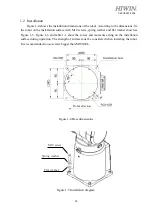
Step1.
Move the robot into its transport posture and the angle of each joint is shown in the table
of Figure 1-1.
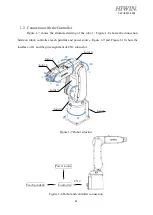
Step2.
Secure the suspension plate to the robot with four M8×1.25P×12L screws as shown in
Figure 1-2. Make the sling go through the suspension plate to keep the center of gravity
under the hanging point shown as Figure 1-3.
,
Please ensure the robot is in stable
condition to avoid overturning.
Step3.
Move the robot to the desired position by using sling.
Step4.
Remove the suspension plate.
[Note] The transport suspension plate (RA605Z541-13) is an optional part. Please refer to
appendix for the dimensions.
Figure 1-1 Transport posture
RA605-710-GC
RA605-909-GC
Содержание RA605-710-GC
Страница 1: ...www hiwin tw User Manual Articulated Robot RA605 GC Original Instruction...
Страница 34: ...33 C22UE001 2004 Figure 2 3 b RA605 909 GC Motion range...
Страница 51: ...50 C22UE001 2004 5 3 Operation Name descriptions of the manual brake release device and their functions...
Страница 68: ...67 C22UE001 2004 8 Appendix Suspension plate refer to section 1 1...







































































