



























16
C22UE001-2004
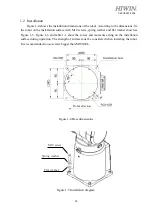
Figure 1-2(a) RA605-710-GC Transport dimensions
Transport Posture Degree
RA605-710-GC
RA605-909-GC
J1
0°
0°
J2
45°
30°
J3
-55°
-55°
J4
0°
0°
J5
-80°
-65°
J6
0°
0°
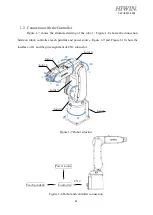
Before carrying the robot, be sure to remove the end
effector which changes the center of gravity.
Please keep stable, slow down and avoid excessive
vibration or shock during transportation.
While placing the robot be sure to avoid the robot and the
installation surface collision.
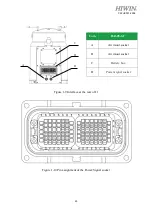
After removing the suspension plate, please maintain it
properly for re-transportation.
Before operation, remove the suspension plate to avoid
danger.
Center of
Gravit
y
Center of
Gravit
y
Hexagon socket cap screw
M8x1.25Px12L
Suspension Plate
Содержание RA605-710-GC
Страница 1: ...www hiwin tw User Manual Articulated Robot RA605 GC Original Instruction...
Страница 34: ...33 C22UE001 2004 Figure 2 3 b RA605 909 GC Motion range...
Страница 51: ...50 C22UE001 2004 5 3 Operation Name descriptions of the manual brake release device and their functions...
Страница 68: ...67 C22UE001 2004 8 Appendix Suspension plate refer to section 1 1...




























































