





























5-178
M60 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
FLEXLOGIC
CHAPTER 5: SETTINGS
5
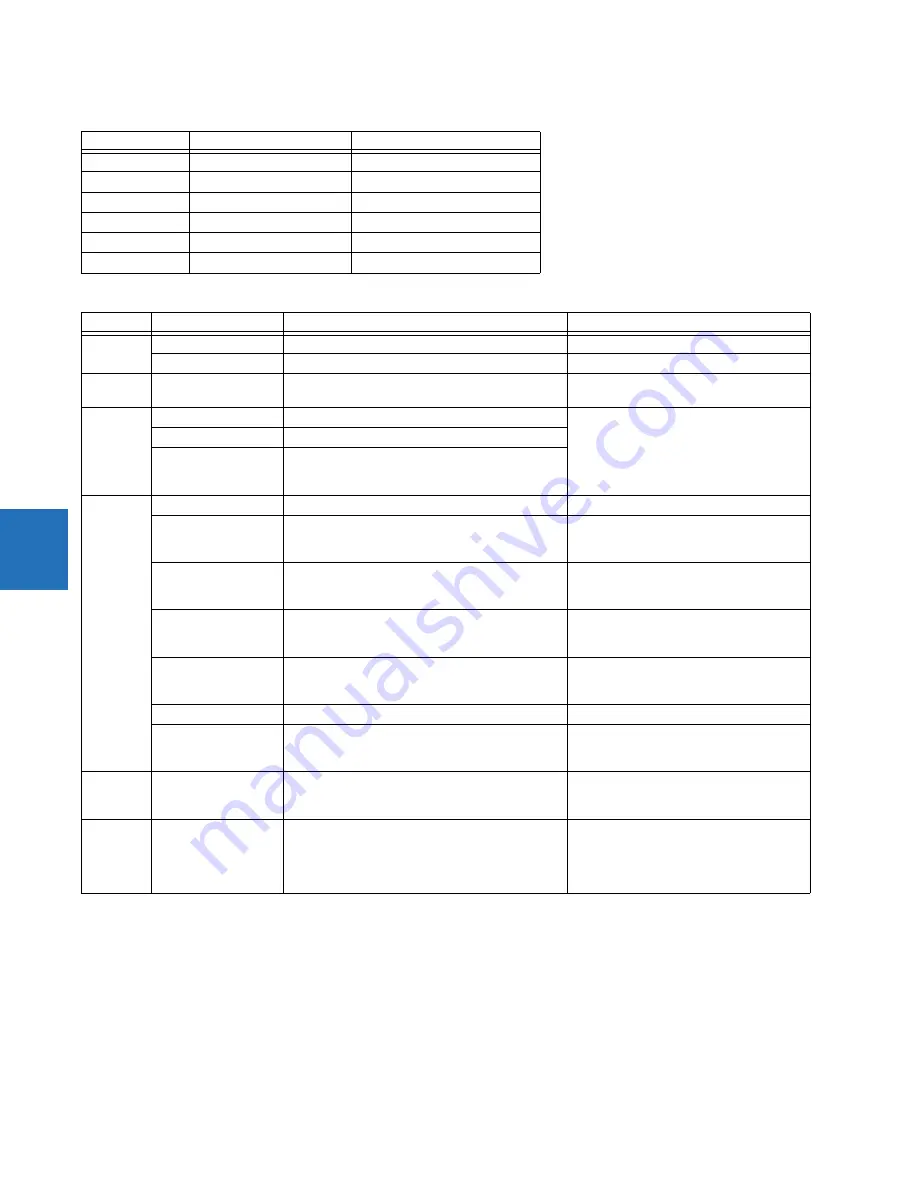
Table 5-21: FlexLogic gate characteristics
Table 5-22: FlexLogic operators
5.6.2 FlexLogic rules
When forming a FlexLogic equation, the sequence in the linear array of parameters must follow these general rules:
1.
Operands must precede the operator that uses the operands as inputs.
2.
Operators have only one output. The output of an operator must be used to create a virtual output if it is to be used as
an input to two or more operators.
3.
Assigning the output of an operator to a virtual output terminates the equation.
4.
A timer operator (for example, "TIMER 1") or virtual output assignment (for example, " = Virt Op 1") can be used once
Gates
Number of inputs
Output is ‘1’ (= ON) if...
NOT
1
input is ‘0’
OR
2 to 16
any input is ‘1’
AND
2 to 16
all inputs are ‘1’
NOR
2 to 16
all inputs are ‘0’
NAND
2 to 16
any input is ‘0’
XOR
2
only one input is ‘1’
Type
Syntax
Description
Notes
Editor
INSERT
Insert a parameter in an equation list
DELETE
Delete a parameter from an equation list
End
END
The first END encountered signifies the last entry in
the list of processed FlexLogic parameters
One-shot
POSITIVE ONE SHOT
One shot that responds to a positive going edge
A ‘one shot’ refers to a single input gate that
generates a pulse in response to an edge on
the input. The output from a ‘one shot’ is
True (positive) for only one pass through the
FlexLogic equation. There is a maximum of
64 ‘one shots.’
NEGATIVE ONE SHOT
One shot that responds to a negative going edge
DUAL ONE SHOT
One shot that responds to both the positive and
negative going edges
Logic
gate
NOT
Logical NOT
Operates on the previous parameter
OR(2)
↓
OR(16)
2 input OR gate
↓
16 input OR gate
Operates on the 2 previous parameters
↓
Operates on the 16 previous parameters
AND(2)
↓
AND(16)
2 input AND gate
↓
16 input AND gate
Operates on the 2 previous parameters
↓
Operates on the 16 previous parameters
NOR(2)
↓
NOR(16)
2 input NOR gate
↓
16 input NOR gate
Operates on the 2 previous parameters
↓
Operates on the 16 previous parameters
NAND(2)
↓
NAND(16)
2 input NAND gate
↓
16 input NAND gate
Operates on the 2 previous parameters
↓
Operates on the 16 previous parameters
XOR(2)
2 input Exclusive OR gate
Operates on the 2 previous parameters
LATCH (S,R)
Latch (set, reset): reset-dominant
The parameter preceding LATCH(S,R) is the
reset input. The parameter preceding the
reset input is the set input.
Timer
TIMER 1
↓
TIMER 32
Timer set with FlexLogic timer 1 settings
↓
Timer set with FlexLogic timer 32 settings
The timer is started by the preceding
parameter. The output of the timer is
TIMER #.
Assign
virtual
output
= Virt Op 1
↓
= Virt Op 96
Assigns previous FlexLogic operand to virtual
output 1
↓
Assigns previous FlexLogic operand to virtual
output 96
The virtual output is set by the preceding
parameter
Содержание M60
Страница 9: ...TABLE OF CONTENTS M60 MOTOR PROTECTION SYSTEM INSTRUCTION MANUAL ix INDEX ...
Страница 10: ...x M60 MOTOR PROTECTION SYSTEM INSTRUCTION MANUAL TABLE OF CONTENTS ...
Страница 14: ...1 4 M60 MOTOR PROTECTION SYSTEM INSTRUCTION MANUAL FOR FURTHER ASSISTANCE CHAPTER 1 INTRODUCTION 1 ...
Страница 208: ...4 88 M60 MOTOR PROTECTION SYSTEM INSTRUCTION MANUAL FLEXLOGIC DESIGN USING ENGINEER CHAPTER 4 INTERFACES 4 ...
Страница 494: ...5 286 M60 MOTOR PROTECTION SYSTEM INSTRUCTION MANUAL CONTROL ELEMENTS CHAPTER 5 SETTINGS 5 Figure 5 158 Time out mode ...
Страница 552: ...5 344 M60 MOTOR PROTECTION SYSTEM INSTRUCTION MANUAL TESTING CHAPTER 5 SETTINGS 5 ...
Страница 596: ...7 14 M60 MOTOR PROTECTION SYSTEM INSTRUCTION MANUAL TARGETS MENU CHAPTER 7 COMMANDS AND TARGETS 7 ...
Страница 602: ...9 4 M60 MOTOR PROTECTION SYSTEM INSTRUCTION MANUAL SATURATION DETECTOR CHAPTER 9 THEORY OF OPERATION 9 ...
Страница 652: ...C 6 M60 MOTOR PROTECTION SYSTEM INSTRUCTION MANUAL COMMAND LINE INTERFACE APPENDIX C COMMAND LINE INTERFACE C ...
Страница 660: ...iv M60 MOTOR PROTECTION SYSTEM INSTRUCTION MANUAL ABBREVIATIONS ...





















































