





























Settings
EFORT INTELLIGENT EQUIPMENT CO.,LTD
142
detection can be used to optimize the phenomenon of false collision alarm or
missing alarm.
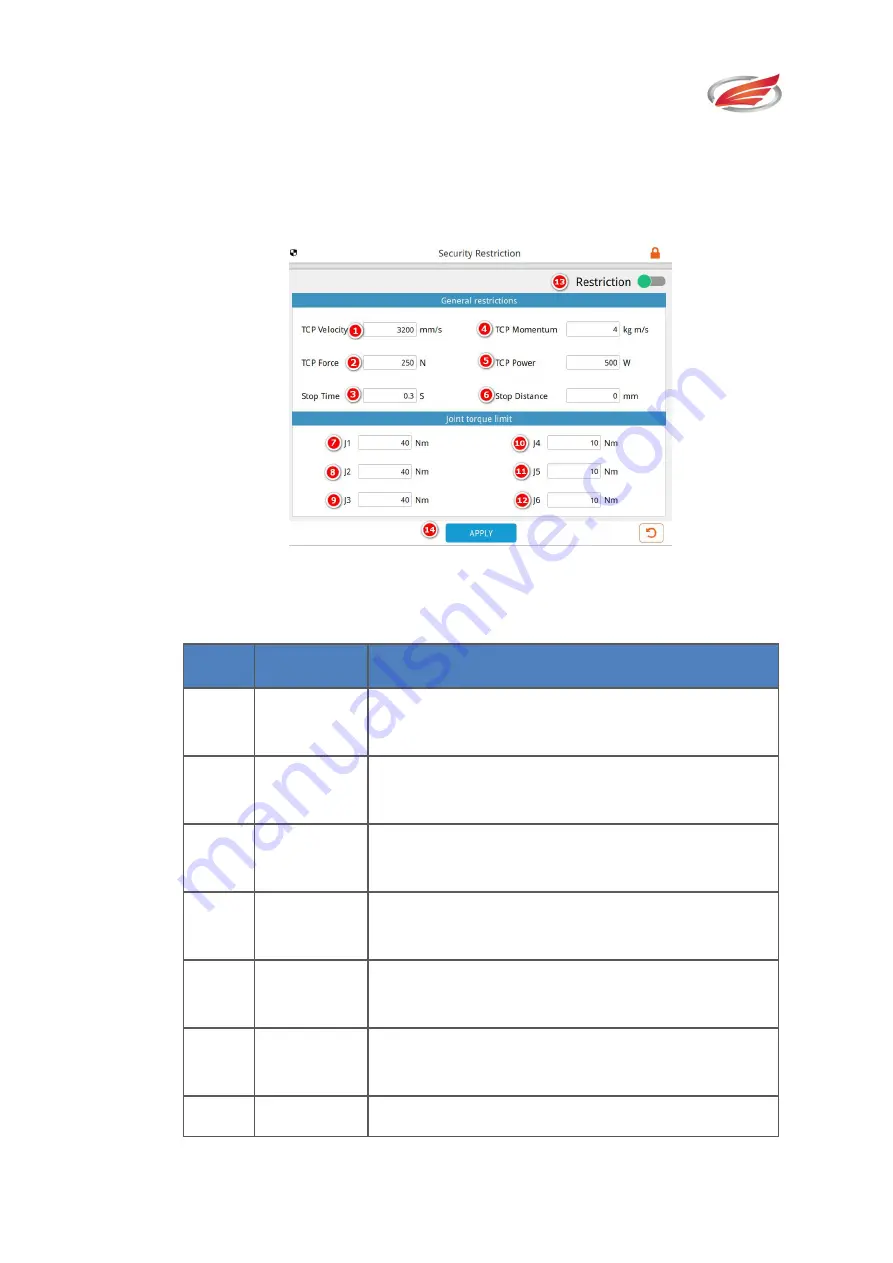
5.2.5 Safety Restriction
Figure 5-34 Security restrictions
Table 5-15 Description of security restriction interface
#
Name
Description
1
TCP spee
d
Limit the Cartesian space velocity of the robot e
nd tool, unit: mm/s.
2
TCP force
Limit the force on the end tool of the robot, uni
t: N.
3
Stop time
Limit the time required for the robot to stop, un
it: s.
4
TCP mom
entum
Limit the momentum of the robot end tool, uni
t: kg.m/s.
5
TCP Pow
er
Limit the power of the robot end tool, unit: W
。
6
Stopping
distance
Limit the distance required for the robot to stop,
unit: s.
7-12
Torque er
Limit the torque error of 1-6 joints of the robot,







































































