





























Settings
EFORT INTELLIGENT EQUIPMENT CO.,LTD
60
#
Demonstration
Remarks
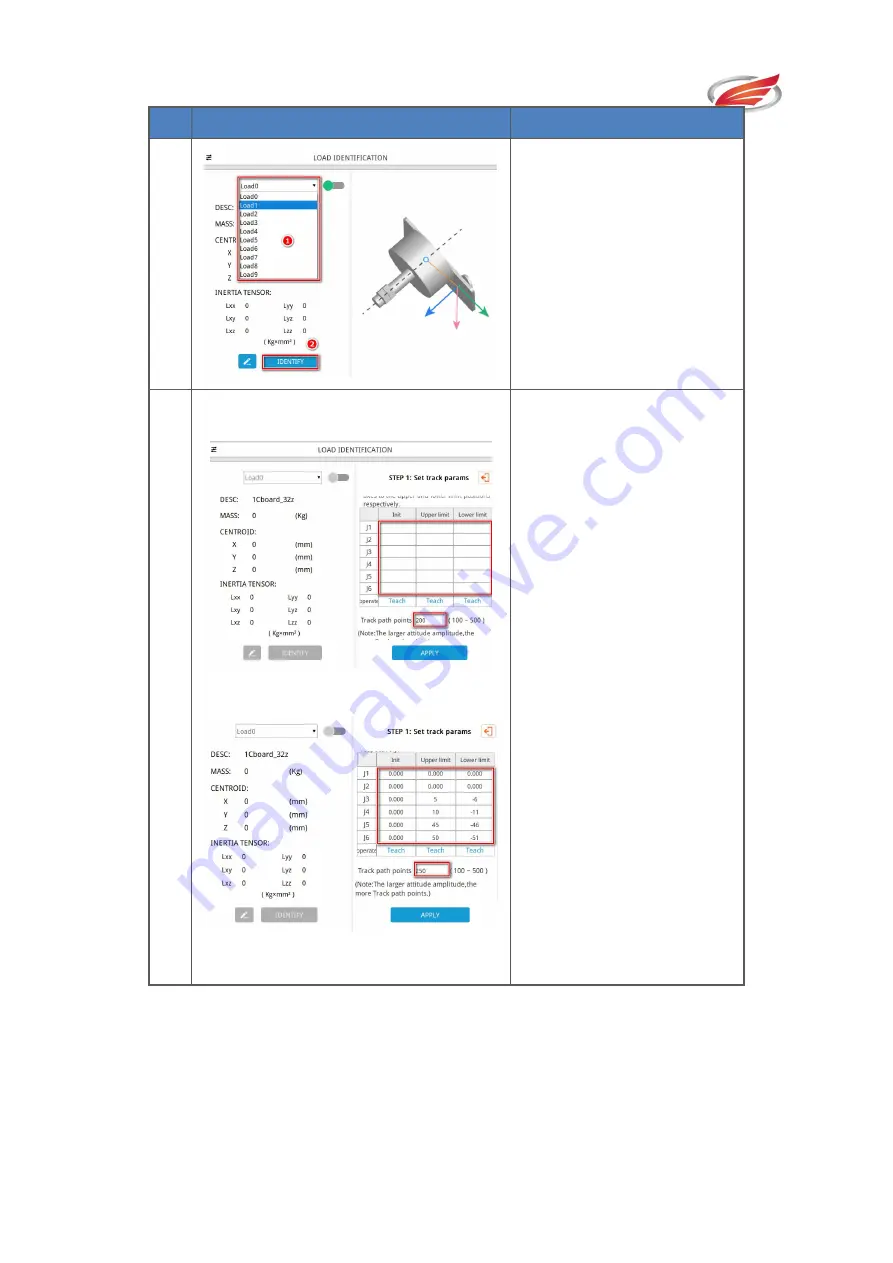
1
①
Select the load to be
identified. (Take Load0 as
an example)
②
Click on IDENTIFY to
enter the identification
interface
2
Explanation for STEP 1:
Set track params
"Operation": click "Teach"
(you can also directly edit
to change the robot axis
3~6) to record the current
robot joint position (where
the upper and lower limit
positions of each axis must
meet the conditions of
prompt 1, otherwise an
error will occur alarms).
Track path points: Set the
number of generated track
path points; (With more
track path points, the
identification process will
be longer and the accuracy
will be higher. Default
value is recommended).